Minimal-invasive motorisierte
Instrumente
|
In den letzten zwei Jahrzehnten hat sich die minimal-invasive Chirurgie (MIC) in vielen Bereichen gegenüber der offenen Chirurgie durchgesetzt. Verglichen mit dieser führt die MIC für den Patienten zu weniger Schnitten und Narben und damit einem deutlich reduzierten Trauma. Daraus resultieren zumeist kürzere Rekonvaleszenzzeiten und geringere Behandlungskosten für die Krankenhäuser. Dennoch werden für diese Technik nach wie vor mehrere Zugänge benötigt, die jeweils mit einem gewissen Infektionsrisiko behaftet sind und mit zunehmender Anzahl die postoperativen Schmerzen und die Rekonvaleszenz verlängern.
Mit Hilfe von Single-Port-Eingriffen kann man die Anzahl der benötigten Zugänge und die damit einhergehenden Risiken der Keimverschleppung auf nur einen Einschnitt verringern. Während dies bei einem Zugang durch den Bauchnabel durchaus kosmetische Vorteile bietet, werden dabei der Arbeitsraum und die Beweglichkeit des Chirurgen jedoch noch weiter reduziert, was Instrumente nötig macht, die eine größere Bewegungsfreiheit innerhalb des Bauchraums aufweisen. Rein manuell gesteuerte Instrumente, die mit zusätzlichen Gelenken ausgestattet sind, weisen starke Reibungen im Schaft auf und lassen damit ein direktes Gespür für die aufgebrachten Kräfte immer weniger zu. Gleichzeitig sind sie zunehmend unergonomisch und schwer zu bedienen. Beides wirkt sich negativ auf die benötigte Geschicklichkeit und das Ergebnis aus. Um den Anwender nicht zu überlasten und damit unnötige Risiken einzugehen sowie die Lernintervalle zu verkürzen, bietet eine telemanipulative motorisierte Ansteuerung die Überwindung dieser Herausforderungen.
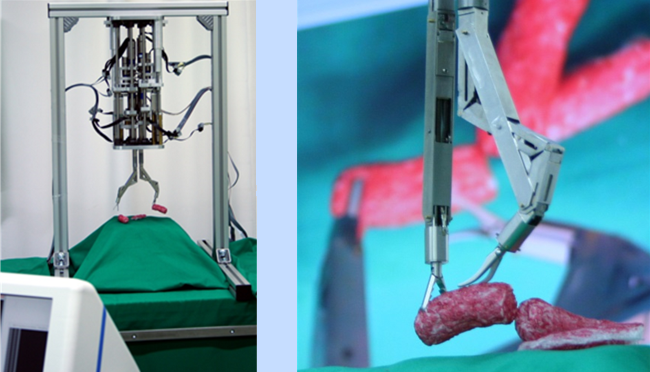
Der entwickelte AKIM-Telemanipulator besteht aus der Instrumentenplattform mit angeschlossenen Instrumenten (Slave) und einer Bedienkonsole mit Eingabegeräten und Bildschirm zur Steuerung der Instrumente sowie zur visuellen Kontrolle (Master). Die Antriebsmotoren für die Instrumente liegen in der oberhalb des Patienten platzierten Plattform und übertragen die Energie in die unabhängig voneinander anschließbaren Instrumente.
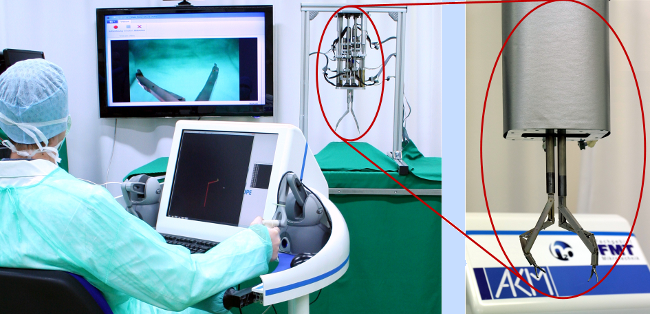
AKIM-Chirurgiesystem
mit Bedienkonsole und Eingabegeräten im Vordergrund
sowie Plattform mit Instrumenten im Hintergrund und rechts
Für den Single-Port-Zugang werden die Instrumente parallel dicht nebeneinander in das Abdomen eingebracht. Im Gegensatz zu einer überkreuzenden Zugangsweise lassen sich dadurch Kollisionen zwischen den Schäften vermeiden und das Gewebe am Trokar wird weniger belastet, die fehlende relative Winkelbewegung zwischen den Instrumenten schränkt jedoch deren Bewegungsraum zusätzlich ein. Dennoch wird dadurch der Gesamtbauraum direkt außerhalb des Patienten erheblich reduziert, was in Notfällen die Zugänglichkeit und Konversion zu einer offenen Operation deutlich erleichtert.
Sind die Instrumente durch den Trokar gebracht, bewegen sie sich erst auseinander und anschließend wieder aufeinander zu, um so an der Spitze eine triangulierende Arbeitsposition einzunehmen, wie sie ChirurgInnen bereits aus der MIC gewohnt sind. Die Plattform nimmt nur einen geringen Raum am Patienten ein, da die Bewegungsfreiheitsgrade alle in den Körper verlagert werden. Die dafür benötigte Gelenkigkeit im Instrumentenschaft wird nicht über flexible Multisegmentketten realisiert, sondern über starre Segmente mit einachsigen Gelenken dazwischen.
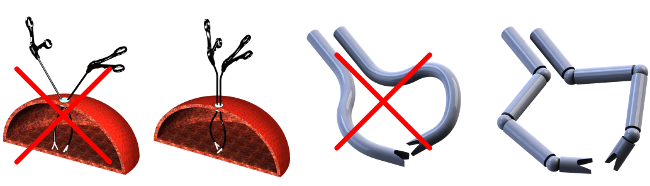
Zugangsweg
(parallel) und
Gestaltungsform der Instrumentenarme (segmentierte
Schäfte)
Die Instrumente bestehen aus einer Armstruktur, die den Umfang des Bewegungsraums festlegt und die gelenkig mit einem Manipulator verbunden ist, der die Feinpositionierung am Eingriffsort vornimmt und direkt mit Gewebe in Kontakt ist. Neben der Betätigung des Werkzeugs stehen zu dessen Positionierung insgesamt fünf Freiheitsgrade zur Verfügung. Die Armstrukturen sind mit einer neuartigen Stützkinematik ausgestattet, die hohe Beweglichkeit mit ausreichender Stabilität in jeder Position verbindet.
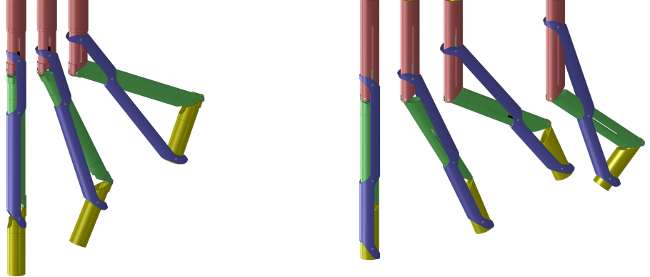
Bewegungsbahn
der selbststützenden Armstruktur
zweier Instrumente (ohne Manipulator
dargestellt)
Um dem Anwender eine bestmögliche Beweglichkeit im Bauchraum zu bieten, wurden die Segmente der den Bewegungsraum definierenden Arme dafür optimiert. Wie aus einer früheren Bewegungsstudie bei Gallenblasenentfernungen an Schweinen festgestellt wurde, findet die eigentliche Bearbeitung im Bauch in einem Zielgebiet von nur ca. 50 Millimeter Kantenlänge statt. Die Instrumente wurden anhand zweier geometrischer Parameter, der seitlichen Position der Spitze und ihrem Neigungswinkel gegenüber dem Trokar, darauf optimiert, einen möglichst großen Geschicklichkeitsraum zu erreichen. Dieser ist Teil des Bewegungsraums und umfasst alle Orte, an denen die Ausrichtung der Spitze um mindestens 60° variiert werden kann. Auf diese Weise ist innerhalb dieses Raums eine erhöhte Geschicklichkeit für den Chirurgen gewährleistet. Werden beide Parameter übereinander in einem Diagramm aufgetragen, ergibt sich eine grafische Darstellung dieses Raums. Durch Variation aller geometrischen Längen der einzelnen Schaftsegmente entstanden Millionen von Armkonfigurationen, jede mit einem eigenen zugehörigen Diagramm. Über Bildauswertungsalgorithmen wurde die Konfiguration gefunden, die den größten Geschicklichkeitsraum aufweist. Derart optimierte Instrumente weisen gegenüber dem zuvor definierten Zielraum einen zwölffach größeren Bewegungs- und einen 4,5-fach größeren Geschicklichkeitsraum auf.
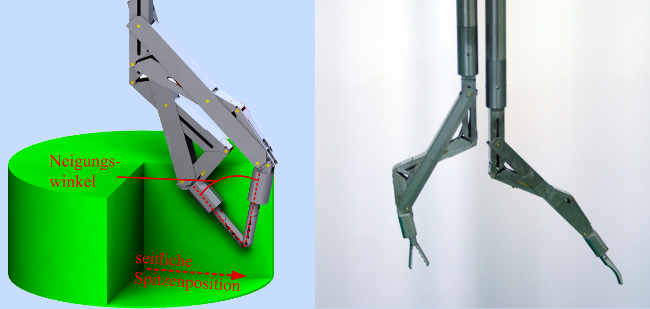
Parameter
zur Bewertung des Geschicklichkeitsraums (links)
mit Beispiel des Bewegungsumfangs (rechts)
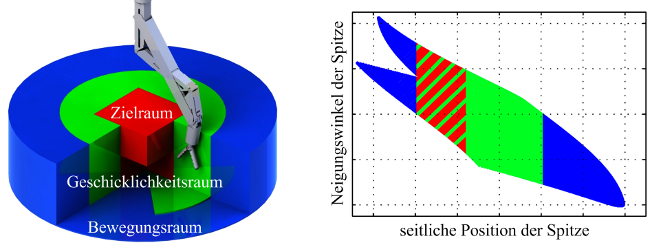
Volumina in isometrischer (links) und Diagrammdarstellung (rechts)
Auch die Manipulatoren wurden
speziell für die Instrumente entwickelt und weisen Getriebestufen und
Spindelgetriebe auf, um eine entkoppelte Betätigung der einzelnen
Freiheitsgrade an der Spitze zu ermöglichen.
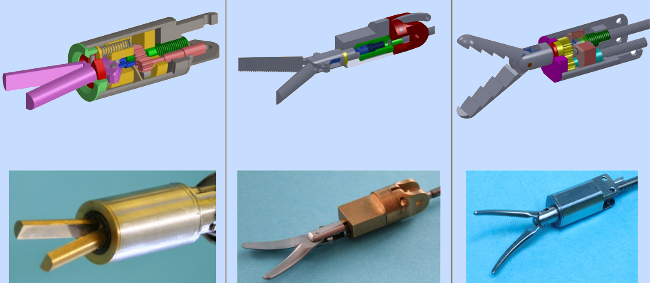
Detailansicht der Modelle und der Prototypen von drei entwickelten Manipulatoren
Die spezielle Bewegungsform der Instrumente erfordert angepasste Antriebsstränge, die eine Entkopplung von gewünschten und unerwünschten Bewegungen ermöglicht. Durch eine Übertragung von Drehmomenten im Innern und gleichzeitigen axialen Ausgleichselementen können sich die Stränge in ihrer Länge an die jeweilige Stellung anpassen, ohne falsche Stellungen zu erzeugen. An der Plattform werden die Instrumentenarme über einen definiert einrastenden Universalanschluss unabhängig voneinander fixiert und gelöst. Dieser Koppelvorgang schließt und trennt sowohl die mechanischen als auch die elektrischen Kontakte zum Instrument.

Innere
Struktur zweier Instrumente mit starren und flexiblen
Antriebssträngen sowie mit Axialausgleichen
Die Flexibilität entlang der Übertragungsstrecke im Innern wird über flexible Wellen gewährleistet. Dadurch kann es in manchen Situationen jedoch zu einem lastbedingten Torsionsversatz zwischen An- und Abtriebsende kommen. Daher sind die Instrumente mit dafür entwickelten integrierten magnetischen Positionssensoren ausgestattet, die am Gelenk selbst die Stellung messen und dadurch ein Nachführen erlauben. Außerdem sind Kollisionssensoren entstanden, die präventiv eine Annäherung an organisches Gewebe erfassen, bevor dies, im ungünstigsten Fall, außerhalb des Sichtbereichs des Chirurgen passiert.
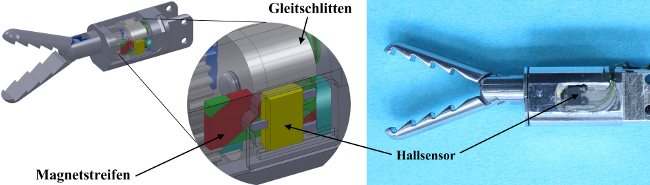
Beispiel
für integrierten Positionssensor,
hier: Messung des
Greiferöffnungswinkels
Integrierter Fasersensor zur frühzeitigen Detektion von Kollisionen mit Gewebe
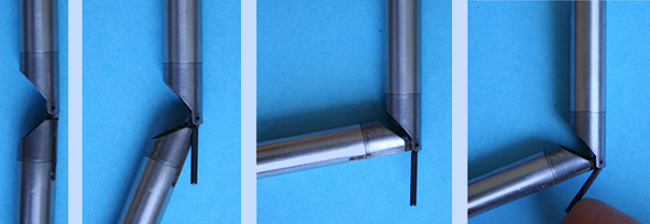
Verletzungen des Patienten und eine Verschleppung von organischem Material durch die ungewöhnliche Schaftstruktur lassen sich durch konfektionierte Schutzhüllen aus besonders elastischen Werkstoffen vermeiden, welche die Instrumente in ihrer Beweglichkeit nicht einschränken. Mehrere Prototypen wurden in repräsentativen Laborexperimenten erfolgreich auf ihre Einsatzfähigkeit getestet. Dabei konnte sowohl die vorgesehene Belastbarkeit als auch der erreichbare Bewegungsumfang bestätigt werden. Spezielle Pick-and-Place- oder Übergabetests vermitteln ein Gespür für die Geschicklichkeit der Instrumente.
Pick-and-Place- bzw. Übergabetests im Laborexperiment
Das AKIM-System ist damit ein vielversprechendes telemanipulatives Chirurgiesystem mit einer Vielzahl bisher nicht bekannter Eigenschaften und Vorteilen, es bildet in dieser Kombination einen einzigartigen technologischen Ansatz zur Lösung von Herausforderungen in der Single-Port-Laparoskopie. Beispielsweise hat die intensive Betrachtung der Instrumente mit dem erzielten Konsens aus Festigkeit und Flexibilität einen wesentlichen Nachteil der Single-Port-Chirurgie überwunden, der bislang einer größeren Verbreitung dieser Technik im Wege stand und die es den Chirurgen nicht erlaubt, ähnlich gute Ergebnisse bei der Behandlung zu erzielen, wie sie in den letzten Jahrzehnten in der Multi-Port-Chirurgie etabliert sind. Die beschriebenen Entwicklungen haben dieses Ziel erreicht, ohne dafür wichtige andere Parameter, wie Widerstandsfähigkeit oder Baugröße, zu missachten. Werden diese Technologien zu neuen Instrumentensystemen vorangetrieben, so steigen für Chirurgen die Chancen, für die jeweilige Behandlung stets das optimale Instrument einzusetzen.
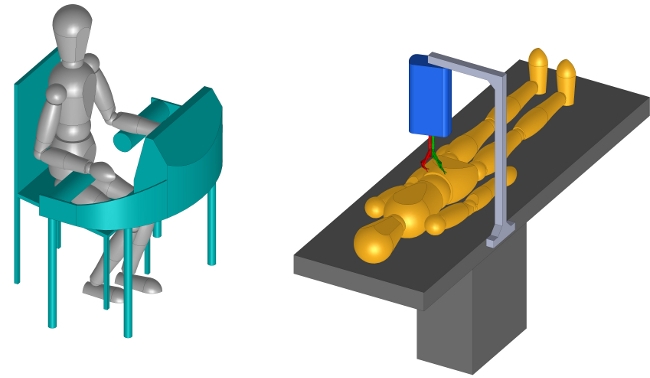
Schematisches
AKIM-Chirurgiesystem mit Eingabekonsole (links)
und Instrumenteneinheit (rechts)