Elektromechanische Antriebseinheit
|
Im Gegensatz zu einem offenen Eingriff werden
in der laparoskopischen minimal-invasiven Chirurgie die Instrumente und
das zur Beobachtung des Operationssitus genutzte Endoskop über kleine
Hautschnitte in den mittels Gasüberdruck aufgestellten Bauchraum
eingebracht. Dadurch ergeben sich kleinere Verletzungen des Patienten,
was den wesentlichen Vorteil dieser Operationstechnik ausmacht.
Nachteilig wirkt sich bei diesem Vorgehen insbesondere die erschwerte
Bedienung der Instrumente aus, da die Eintrittsstellen in den Körper
als Drehpunkt wirken und somit die Bewegung einschränken. Bei Anwendung
der Single-Port-Technik wird sogar nur ein Hautschnitt benötigt, die
Verletzung des Patienten also weiter reduziert. Allerdings schränkt die
Nutzung nur eines Zugangs die Instrumentenhandhabung weiter ein.
Hier setzen Telemanipulationssysteme an. Sie verbessern die Bedienbarkeit, indem die am Patienten agierenden Instrumentenarme motorisch angetrieben sind. Die Arme bewegen sich ausschließlich gemäß Vorgaben, die an einer Eingabekonsole getätigt werden. Diese Konsole befindet sich nicht direkt am Patienten und lässt sich aufgrund der so entfallenden Einschränkungen ergonomisch günstig gestalten. Zudem besteht die Möglichkeit, die Benutzereingaben vor der Ausführung durch die Instrumentenarme anzupassen, beispielsweise durch Über- oder Untersetzungen sowie das Herausfiltern des natürlichen Handzitterns, das im Lauf einer langen Operation häufig zunimmt.
Das mit Mitteln des Europäischen Fonds für Regionale Entwicklung (EFRE) geförderte Projekt AKIM hatte die Entwicklung eines neuartigen Telemanipulationssystems zum Ziel. Der AKIM-Telemanipulator zeichnet sich dadurch aus, dass zwei Instrumentenarme durch einen Zugang in den Patientenkörper gelangen und während der Operation nach außen praktisch unbeweglich bleiben. Die Bewegung der Arme erfolgt im Patientenkörper, wo sich das System nach Passieren des Zugangs zunächst entfaltet, um dann die verschiedenen Instrumente aus unterschiedlichen Richtungen an den Ort der gewünschten Manipulation zu führen. Dieses sogenannte triangulierende Arbeiten entspricht dem natürlichen Bewegungsablauf des Menschen und stellt somit eine intuitive Bedienbarkeit sicher.

Konzept
des AKIM-Telemanipulationssystems:
Bedienervorgaben an der Eingabekonsole werden
durch eine Recheneinheit in Motorstellbefehle gewandelt,
entsprechend derer die Antriebseinheit die Instrumentenarme bewegt
Aufgrund der notwendigerweise filigranen Gestaltung der Instrumentenarme, lassen sich die Antriebe nicht in diese integrieren. Um die gewünschte Bewegung der Arme sicherzustellen, ist folglich eine Antriebseinheit notwendig. Diese lässt sich direkt oberhalb der Bauchdecke des Patienten platzieren. Um den direkten Zugang des medizinischen Personals zum Patienten möglichst wenig einzuschränken, ist die Antriebseinheit möglichst kompakt zu gestalten, was bei eventuell auftretenden Komplikationen extrem wichtig sein kann.
Beim Einsatz der Instrumentenarme wird die von den Antrieben erzeugte Bewegung dorthin geführt, wo eine Aktion stattfindet. In den meisten Fällen ist eine Bewegungswandlung innerhalb des Patientenkörpers nötig, für die entsprechende Mechanismen im Arm vorzusehen sind. Neben diesen intrakorporalen Freiheitsgraden erzeugt die Antriebseinheit zwei unabhängige Bewegungen der Arme direkt, ohne dass es hierfür weiterer Bauteile im Arminnern bedarf. Dabei handelt es sich um die Linearbewegung entlang der Instrumentenlängsachse sowie die Rotation um diese Achse. Dadurch ist ein kompakter Aufbau der Instrumentenarme gewährleistet.
Neben dem Antrieb der Instrumentenarme dient die Einheit auch zu deren Fixierung am Patienten. Dabei ist es vorteilhaft, eine Möglichkeit zum Wechsel der Arme vorzusehen. So lässt sich das System an unterschiedliche Operationsszenarien anpassen, indem die jeweils passenden Instrumente zum Einsatz kommen.
Die Entwicklung des AKIM-Telemanipulators
erfolgte in zwei Schritten. Dabei flossen wesentliche Erkenntnisse aus
den Erprobungen des ersten Aufbaus in die zweite Entwicklungsstufe ein.
Folglich entstanden auch zwei an das jeweilige Gesamtsystem angepasste
Antriebseinheiten. Die zweite Entwicklungsstufe zeichnet sich
vornehmlich durch zwei wesentliche Verbesserungen aus:
Zunächst waren die Instrumentenarme im ersten aufgebauten Telemanipulator nicht ohne weiteres auswechselbar. Somit ist für dieses System eine Anpassung an verschiedene operative Eingriffe nur möglich, indem sich entweder die Werkzeuge an den distalen Enden der Arme tauschen lassen oder das Gesamtsystem außerhalb des Krankenhauses angepasst wird. Durch die Integration eines für verschiedene Instrumententypen geeigneten Adapters in die Antriebseinheit sind die Arme in der zweiten Entwicklungsstufe des AKIM-Systems problemlos auswechselbar.
Weiterhin konnte der ohnehin kompakte Aufbau
der Ansteuerungseinheit beim Übergang zur zweiten Generation noch
einmal erheblich verkleinert werden. Grund hierfür ist das verbesserte
Übertragungssystem für die Bewegungen der intrakorporalen
Freiheitsgrade.

Antriebseinheit
des AKIM-Telemanipulators:
erste (links) und zweite (rechts) Entwicklungsstufe
Nach ausführlichen Untersuchungen zu geeigneten
Antrieben, die sowohl die Recherche und Bewertung kommerziell
erhältlicher Aktoren als auch spezialisierte Eigenentwicklungen
einschlossen, fiel die Wahl auf bürstenlose Gleichstrommotoren mit
integrierter Ansteuerelektronik. Zur Anpassung von Moment und Drehzahl
der erzeugten Drehbewegung an die jeweiligen Anforderungen der
gewünschten Bewegung bilden die Motoren mit passenden Planetengetrieben
eine Antriebseinheit. Anschließend erfolgt die Übertragung der Bewegung
weiterhin in Form einer Drehung bis zum jeweiligen Einsatzort. Damit
die Übertragungsstränge die Bewegungen des Instrumentenarms
nachvollziehen können, sind sie mit Abschnitten aus flexiblen
Wellenelementen versehen. Da die Biegsamkeit dieser Elemente jedoch
nicht bei gleichzeitiger idealer Torsionssteifigkeit zu erreichen ist,
gilt es für eine exakte Bewegung, die Gesamtlänge der flexiblen
Wellensegmente gering zu halten. Innerhalb der Antriebseinheit kommen
deshalb ausschließlich starre Übertragungselemente zum Einsatz. Darüber
hinaus muss eine voneinander unabhängige Bewegung aller Freiheitsgrade
der Instrumente möglich sein.
Mit dem unten dargestellten Übertragungssystem
gelingt die Kombination dieser Ansprüche. Die Bewegungsübertragung
erfolgt ausschließlich über Stirnradstufen sowie Voll- und Hohlwellen.
Somit ist eine präzise Betätigung aller Freiheitsgrade sichergestellt.
Die Wellen werden entlang eines Abschnitts der Übertragungsstrecke
ineinander und gleichzeitig konzentrisch zum Instrumentenschaft
geführt. Das hat zur Folge, dass eine Rotation des Instrumentenarms um
seine Hauptachse nicht das Mitschwenken der Antriebe der
intrakorporalen Freiheitsgrade erfordert. Das große, für das
Verschwenken der Antriebe vorzusehende Volumen lässt sich beim Aufbau
der Antriebseinheit einsparen. Eine parasitäre Bewegung der
Übertragungselemente, die bei diesem Aufbau aus einer Armrotation
folgt, lässt sich durch eine entsprechende Ansteuerung der Motoren
ausgleichen. Da hier lediglich die konstanten Übersetzungen der
Stirnradstufen eine Rolle spielen, ist die Berechnung unproblematisch
und ohne nennenswerte Zeitverzögerung möglich.
Mit dem gezeigten Übertragungssystem lassen
sich die Motoren weitgehend unabhängig von der Lage der
Übertragungsmechanismen innerhalb der Instrumentenarme platzsparend in
der Antriebseinheit positionieren. Die Lage der distal gelegenen
Abtriebswellen des Übertragungssystems entspricht dabei der Lage der
korrespondierenden Stränge im Instrumentenarm. Hier erfolgt ein
direkter Übergang in den Adapter, der zur Instrumentenkopplung dient.
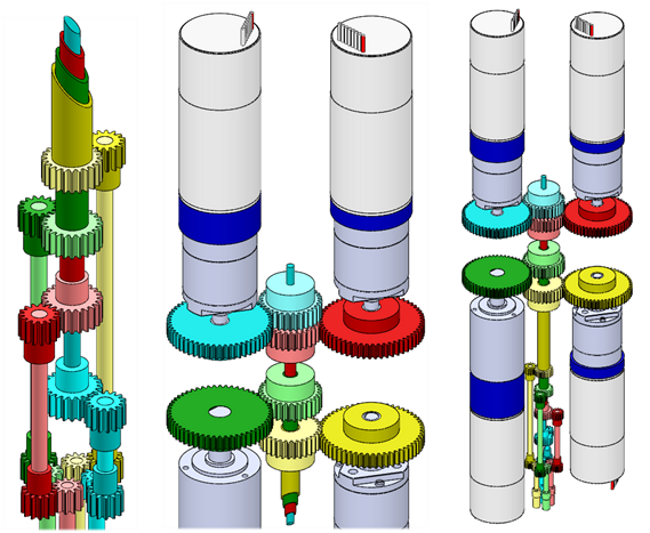
Antriebssystem
der intrakorporalen Freiheitsgrade:
distaler Abschnitt (links) und proximaler Abschnitt (Mitte),
Gesamtansicht (rechts)
Die Übertragungsstränge der intrakorporalen
Freiheitsgrade enden in der Plattform in quadratischen Hohlprofilen.
Entsprechende Außenprofile an den Übertragungssträngen im
Instrumentenarm greifen in diese ein und bilden einen Formschluss. Dies
geschieht durch axiales Einführen des Instruments in den Adapter. Dabei
verbinden sich auch die beiden Seiten eines elektrischen
Steckverbinders, welcher der Übertragung elektrischer Signale und der
elektrischen Energie für die in den Instrumentenarmen vorgesehenen
Sensoren dient.
Zur axialen Sicherung des Arms drückt eine über
dem Adapter laufende Außenhülse Kugeln in eine um den
Instrumentenschaft verlaufende Nut. Eine Feder verhindert ein
Verrutschen der Hülse. Auch wenn eine Kraft auf die Kugeln wirkt, führt
dies nicht zu einer Bewegung der Hülse, so dass ein Lösen der axialen
Sicherung nur durch ein aktives Verschieben der Hülse gegen die
Federkraft möglich ist. Aus dem Adapter austretende Profile greifen in
passende Aussparungen im Instrumentenschaft und verhindern auf diese
Weise ein Verdrehen des Arms gegenüber dem Adapter. Dabei sichert die
Gestaltung der Profile eine eindeutige rotatorische Ausrichtung
zwischen Arm und Adapter.
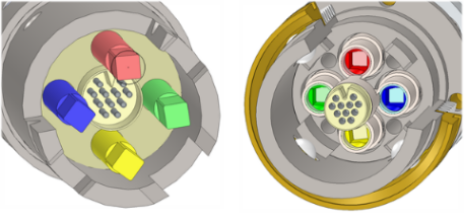
Sicht in den Instrumentenschaft und den Adapter
Um die Rotation des Instrumentenarms um seine
Hauptachse anzutreiben, reicht es deshalb, den Adapter zu drehen. Dazu
ist dieser mit einer Struktur verbunden, in der auch die Lagerung der
Übertragungsstränge für die intrakorporalen Freiheitsgrade erfolgt.
Diese Struktur wird über eine Stirnradstufe durch einen weiteren Motor
gedreht, welcher raumfest zu den Antrieben der intrakorporalen
Freiheitsgrade im sogenannten Motormodul fixiert ist. Für jeden der
beiden Instrumentenarme weist die Antriebseinheit ein Motormodul auf,
welches die vier im Arm erzeugten Bewegungen sowie die Rotation um die
Instrumentenhauptachse antreibt. Der sowohl im Vergleich zur ersten
Entwicklungsstufe als auch in absoluten Maßstäben extrem kompakte
Aufbau der Motormodule stellt das insgesamt geringe Volumen der
Antriebseinheit sicher.
Für die verbleibende Bewegungsform der Instrumentenarme, die Linearbewegung entlang ihrer Achse, bewegen sich die Motormodule in der Plattform auf hierfür vorgesehenen Linearführungen. Linearkugellager sorgen hier für eine genaue Bewegung und einen hohen Wirkungsgrad. Die Linearbewegung wird mittels einer Kugelumlaufspindel aus der Rotation eines zu den übrigen Antrieben baugleichen Gleichstrommotors erzeugt.
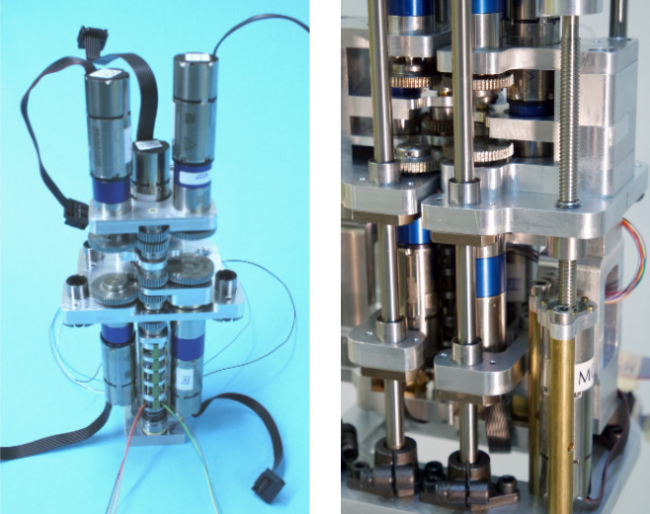
Instrumentenmodul
(links),
Linearführungen und Antrieb mit Kugelumlaufspindel (rechts)
Die Antriebseinheit erfüllt die ihr
zugewiesenen Funktionen zuverlässig und sichert so eine präzise und
intuitive Bedienung der Instrumentenarme. Zudem erbringt sie die für
einen minimal-invasiven Eingriff erforderlichen Kräfte und
Bewegungsgeschwindigkeiten. Durch den miniaturisierten Aufbau nimmt das
System wenig Platz über dem Patienten ein und trägt so zu einer
sicheren Operation bei. Zudem besteht keine Gefahr einer Verletzung
oder Behinderung des direkt am Operationstisch agierenden medizinischen
Personals durch Armbewegungen des Telemanipulators außerhalb des
Patientenkörpers. Die Entwicklung dieser innovativen Antriebseinheit
trägt also maßgeblich zum erfolgreichen Aufbau des
AKIM-Telemanipulators bei.
Bei der Erprobung des AKIM-Systems in einer
Laborumgebung zeigte sich das immense Potential dieses
Telemanipulators. Das Funktionsmuster weist einen großen
Bewegungsumfang auf und erlaubt dabei geschickte Manipulationen. Der
geringe Platzbedarf in der Operationsumgebung stellt einen erheblichen
Vorteil gegenüber den am Markt erhältlichen Systemen dar. Gleichzeitig
lag bei der Entwicklung besonderes Augenmerk auf der Minimierung der
Herstellungs- und Wartungskosten. Bei einer erfolgreichen Umsetzung der
neu erarbeiteten Ansätze in ein marktfähiges Produkt eröffnen sich hier
neue Perspektiven für den Single-Port-Ansatz in der minimal-invasiven
Chirurgie.

Das
AKIM-System in der Laborerprobung:
Bedienkonsole mit integrierter Rechnereinheit im Vordergrund
und elektromechanische Antriebseinheit
mit gekoppelten Instrumentenarmen im Hintergrund