Druckneutrale Komponenten für die Tiefsee
|
Im Rahmen des vom BMWi geförderten Projekts „Druckneutrale Systeme“ werden Komponenten und Systeme entwickelt, die für das Betreiben eines neuartigen Unterwasserfahrzeugs erforderlich sind. Im Gegensatz zu konventionellen Fahrzeugen gibt es keine Druckhüllen, um sie in Tiefen von mehreren Tausend Metern vor dem hydrostatischen Druck zu schützen. Sie sind druckneutral gestaltet und können in sehr großen Tauchtiefen eingesetzt werden. Alle Einbauten sind dem Umgebungsdruck ausgesetzt und direkt vom Meerwasser umspült. Im Folgenden werden einige Beispiele vorgestellt.
Komponenten eines druckneutralen Lagetrimmsystems
Im Unterwasserfahrzeug DNS Pegel befindet sich ein Lagetrimmsystem, mit dem sich bei Geradeausfahrt eine waagerechte Lage und beim Tauchen eine Fahrzeugneigung einstellen lässt. Dazu fördert eine Hydraulikpumpe eine Flüssigkeit mit einer im Vergleich zu Wasser unterschiedlichen Dichte zwischen zwei dehnbaren Faltenbälgen, die sich am Bug und Heck des Fahrzeugs befinden. Durch die Flexibilität der Behälter ist eine plastische Änderung der Behälterform unter hohem Außendruck auszuschließen.

Das Pumpen des Trimmfluids nach Bug und Heck des Fahrzeugs erfolgt mit Hilfe einer Zahnradpumpe. Sie ist durch eine magnetische Kupplung mit dem druckneutral gestalteten Antriebsmotor gekoppelt.
Um einen Rückfluss der Trimmflüssigkeit zwischen bug- und heckseitigem Behälter zu verhindern, wird ein Zwei-Wege-Ventil eingesetzt. Durch einen Verguss mit einem Gießharz ist Seewasserbeständigkeit gegeben.
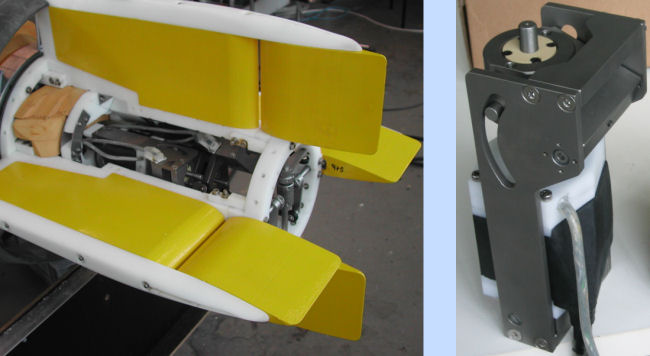
Komponenten einer druckneutralen Ruderanlage
Für Kurvenfahrten sowie für Auf- bzw. Abtauchvorgänge ist das Unterwasserfahrzeug mit einer Ruderanlage ausgestattet. Sie besteht aus zwei gekoppelten Seitenrudern und zwei getrennt beweglichen Höhenrudern. Ihre Ansteuerung erfolgt über druckneutrale Servomotoren, die direkt im Meerwasser betrieben werden. Die Drehbewegung der Motorabtriebswelle wird durch eine Schlittenführung in eine Linearbewegung umgewandelt, über welche die Ruderflächen verstellbar sind. Motor und Mechanik ergeben ein kompaktes Modul. Die Winkel jedes Ruders werden durch druckneutrale Winkelsensoren erfasst und lassen sich daher präzise einstellen.
Druck- und Tiefensensor
Zur exakten Bestimmung der Tauchtiefe des Fahrzeugs wurde ein Druck- und Tiefensensor entwickelt, der bis zu Außendrücken von 600 bar einsetzbar ist. Zwecks Vergleichtests wurde der Drucksensor an einer CTD-Sonde befestigt und in eine Meerestiefe von etwa 5.000 Meter im Nordatlantik herabgelassen. Eine druckneutrale Energiequelle und eine akustische Modemverbindung erlaubten die direkte Auswertung der gemessenen Daten. Die Tests zeigten, dass der Sensor eine Höhenauflösung von ± 1 Meter im Bereich von 0 bis 400 bar erzielt. Temperatureinflüsse konnten nicht festgestellt werden.

Eigenschaften druckneutraler Systeme
• alle Komponenten sind druckneutral aufgebaut
• fehlende Druckhüllen bieten einen einfachen und preiswerten Aufbau der Systeme
• korrosionsbeständig, auch bei langfristigem Einsatz in Meerwasser
Projektförderung
Bundesministerium für Wirtschaft und Technologie
Projektträger Jülich
Projektpartner
ENITECH Energietechnik Elektronik GmbH, Bentwisch
Leibniz-Institut für Ostseeforschung Warnemünde, Rostock