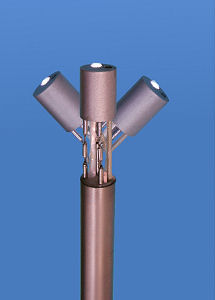
Endoskop mit abwinkelbarer Spitze
|
Im Rahmen des vom
Bundesministerium für Bildung und Forschung
geförderten Projekts Endoguide
erfolgte die Entwicklung eines Endoskops für
Bauchraumoperationen (Laparoskop) mit flexibler Spitze.
Endoguide ist ein Teilprojekt der Innovationsallianz Virtuelle
Techniken, gefördert vom BMBF / Deutsches Zentrum für Luft- und
Raumfahrt mit einem Gesamtvolumen von über
sechs
Millionen Euro.

Die minimal-invasive Chirurgie hat inzwischen sowohl in der Diagnostik als auch in der Therapie große Fortschritte gemacht und in verschiedenen Bereichen konventionelle Behandlungsmethoden bereits verdrängt. Neben den wesentlich kleineren Narben sprechen vor allem die geringeren postoperativen Schmerzen und die kürzere Heildauer für diese Technik.
--

--
Die heute üblichen Arbeitsbedingungen der minimal-invasiven Chirurgie erschweren die Arbeit für den Operateur auf unterschiedliche Arten. Bedingt durch den kleinen Blickwinkel handelsüblicher Endoskope kann der Arzt nur einen eingeschränkten Teil des Operationssitus betrachten. Da die Endoskopkamera von einem Assistenten gehalten wird, ist eine gute Abstimmung mit diesem für eine effektive Bildsteuerung erforderlich.
--
Das Ziel der Entwicklung bestand darin, ein neuartiges Endoskop aufzubauen, um die genannten Probleme bei minimal-invasiven Eingriffen zu beseitigen. Anhand der Ansteuerung der flexiblen Spitze erfolgt die Bildsteuerung, gleichzeitig wird dabei der Sichtbereich vergrößert und die Bildstabilität erhöht. Die elektronische Ansteuerung ermöglicht zusätzlich die Integration verschiedener Mensch-Maschine-Schnittstellen, wodurch die Endoskopsteuerung vereinfacht wird, da sie vom Chirurgen nur einmal eingestellt werden muss.
--
Im
Gegensatz zu allen
anderen am Markt erhältlichen Systemen erlaubt das Endoskop
die
Änderung des Blickwinkels, ohne dabei den Bildhorizont zu
verdrehen. Dabei wird eine sehr hohe Genauigkeit beim wiederholten
Anfahren von festgelegten Positionen erreicht.
In
einem weiteren
Projektteil wird die Halterung des Endoskopsystems entwickelt, um so
auf einen Kameraassistenten verzichten zu können.

Wesentliche Bestandteile der Entwicklung:
• bewegliche Spitze von kurzer Baulänge
• hohe Beweglichkeit der flexiblen
Spitze
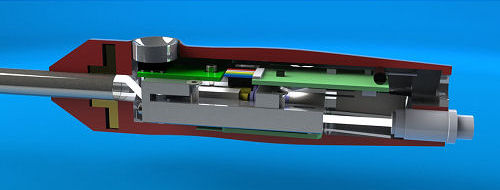
• intergrierte elektrische Antriebe
für die Bewegungserzeugung
• angepasste optische Komponenten in
der Spitze
• Mensch-Maschine-Interface zur Steuerung des Endoskops
--
Projektpartner:Fraunhofer FIRST, BerlinHow-to-Organize GmbH, BerlinKARL STORZ GmbH & Co. KG, TuttlingenMIC Klinik für Minimal Invasive Chirurgie, BerlinPaul Peschke GmbH, Leibertingen |
 |
 |
Projektförderung |
 |