Die Entwicklung von autonomen
Unterwasserfahrzeugen
|
Durch
das fortwährende Wachstum der Wirtschaft steigt der Rohstoffverbrauch
der Menschheit immer weiter an. Zwangsläufig wird auch im Meer nach
neuen Vorkommen gesucht, um die Versorgung mit Metallen, Mineralien und
Primärenergieträgern sicherzustellen. Die Exploration von
Rohstofffeldern im Meer stellt hohe Anforderungen an die verwendete
Technik. Der Druck nimmt mit steigender Tauchtiefe extrem zu, das
Seewasser ist korrosiv, und es greift nahezu alle metallischen
Materialien an. Hinzu kommen eine niedrige Temperatur, Biofouling,
Sedimente, die sich in mechanischen Bauteilen ablagern sowie die
Schwierigkeit, eine Kommunikations- und Energieverbindung herzustellen.
Trotzdem ist hochauflösendes Kartenmaterial der Meeresböden notwendig,
um erfolgreich und wirtschaftlich die Rohstoffe zu fördern.
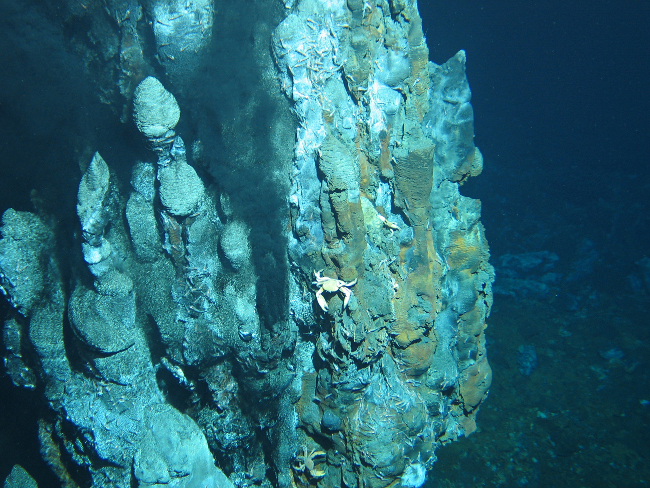
Schwarzer Raucher am Mittelatlantischen Rücken, ROV Kiel 6000, GEOMAR
Lange Zeit war eine Erforschung der Tiefsee aufgrund mangelnder technischer Geräte nicht möglich. Erst der Einsatz von Verankerungen oder kabelgebundenen Tauchrobotern ermöglichte eine genauere Untersuchung des Meeresbodens. Dabei können beide Systeme nur lokal Messdaten aufnehmen oder Manipulationen durchführen. Aus diesem Grund begannen Wissenschaftler Ende der 1950er-Jahre nach Wegen zu suchen, auch horizontal, entlang einer Strecke, Messgeräte durch das Meer zu bewegen und Daten aufzunehmen. Eine weitere Motivation stellte die Notwendigkeit dar, Messdaten unter Eisschollen zu sammeln. Das Resultat dieser Bestrebungen mündete in der Entwicklung von autonomen Unterwasserfahrzeugen.
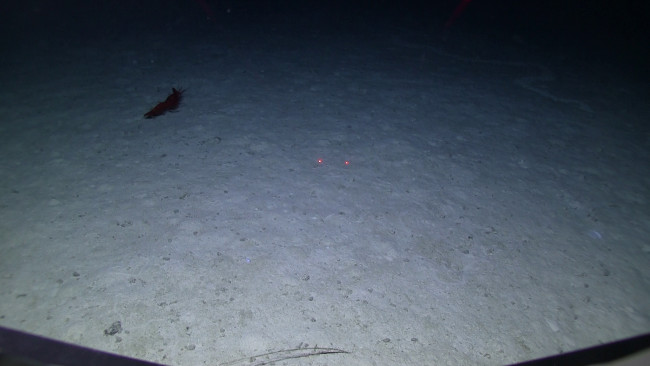
Aufnahme der Tiefsee vom Tauchroboter ERNO 2 unseres Projektpartners
Das erste entwickelte Fahrzeug war das Self Propelled Underwater Research Vehicle (SPURV) der University of Washington. Bereits in der ersten Ausbaustufe konnten Tiefen von 3.000 Meter bei einer Einsatzzeit von über fünf Stunden erreicht werden. Das Fahrzeug mit einer Aluminiumhülle wog 480 Kilogramm und ließ sich über eine akustische Verbindung vom Forschungsschiff aus steuern. Mit Hilfe seiner Sensoren für Druck und Temperatur konnte das SPURV selbstständig Isobaren folgen oder zwischen zwei Tiefen sägezahnähnlich hin und her wechseln. Bis in die 1970er-Jahre hinein wurden das Fahrzeug sowie seine fünf Nachfolger bei über 400 verschiedenen Einsätzen genutzt.
Angeregt durch diesen Erfolg startete die Weiterentwicklung der autonomen Fahrzeuge parallel in Frankreich, den USA und der UDSSR. Die ersten beiden russischen Fahrzeuge L1 und L2 wurden Anfang der 1970er-Jahre im Institute of Marine Technology Problems (IMTP) in Wladiwostok konzipiert. Sie waren in der Lage, eine Tauchtiefe von 6.000 Meter zu erreichen. Die erste Testfahrt wurde im Jahr 1980 bei einer Tauchtiefe von 5.930 Metern durchgeführt. Zu dem Zeitpunkt begann bereits die Weiterentwicklung der Fahrzeuge, die im AUV MT-88 mündete. Auch dieses Tauchboot war für eine Tauchtiefe von 6.000 Meter ausgelegt. Angetrieben wurde es von vier Schubdüsen am Heck. Dabei sind die Düsen so angeordnet, dass eine Richtungssteuerung ohne eine Anstellung von Rudern möglich ist. Die Energieversorgung des vier Meter langen und eine Tonne schweren Fahrzeugs bestand aus einer Silber-Zink-Batterie in einer Druckhülle. Zum Abtauchen verwendete es Bleigewichte. Sobald es die angestrebte Tauchtiefe erreichte, wurden einzelne Gewichte abgeworfen, bis sich ein neutraler Trimm einstellte. Zum Auftauchen wurden die restlichen Gewichte gelöst. Neben der wissenschaftlichen Arbeit wurde es auch vom Militär eingesetzt, um gesunkene Atom-U-Boote ausfindig zu machen und zu fotografieren.
Aus demselben Grund entwickelte
die US Navy das AUSS (Advanced Unmanned Search System). Das 1983 in
Dienst gestellte Fahrzeug war 4,2 Meter lang und wog 1,2 Tonnen. Bei
einer Einsatzdauer von zehn Stunden konnte es gesunkene Flugzeuge,
U-Boote oder Schiffe aufspüren und mit einer Kamera fotografieren. Wie
das MT-88 nutzte es Gewichte zum Ab- und Auftauchen. Eine Besonderheit
stellte die verwendete Druckhülle aus faserverstärktem Kunststoff dar.
Infolge der Nutzung des sehr leichten Materials lies sich der gesamte
Auftrieb durch die Druckhülle generieren. Somit war kein
syntaktischer Auftriebsschaum erforderlich.

AUV
Epaulard vom IFREMER
Photograph by Rama, Wikimedia Commons, Cc-by-sa-2.0-fr
In Frankreich wurde zeitgleich das
AUV L’Epaulard (französisch: Schwertwal) von EAC SA für das IFREMER
(Institut français de recherche pour l'exploitation de la mer)
entwickelt. Nach der Inbetriebnahme im Jahr 1980 wurde es über
einen Zeitraum von elf Jahren eingesetzt. Es wiegt fast drei Tonnen,
ist
vier Meter lang, zwei Meter hoch und nur einen Meter breit. Die
zulässige Tauchtiefe beträgt 6.000 Meter. Eine Besonderheit ist der
außerhalb einer Druckhülle liegende, druckkompensierte Bleiakkumulator.
Eine der ersten Missionen des AUVs wurde im Jahr 1983 für die US Navy
durchgeführt. Hierbei bestand die Aufgabe, das Wrack eines Flugzeugs zu
finden und zu fotografieren. Zur Bildgebung waren eine Kamera und ein
Blitzlicht im Fahrzeug eingebaut, die zusammen alle drei Sekunden ein
Foto aufnahmen. Zum Ab- und Auftauchen verfügte das Fahrzeug über zwei
Gewichte. Waren beide Gewichte am Fahrzeug befestigt, tauchte es ab.
Nach dem Abwurf eines Gewichts besaß das AUV einen leichten Abtrieb.
Bei dem Abwurf des zweiten Gewichts stieg das Fahrzeug wieder auf.
Zusätzlich zu den beiden Gewichten war eine Ankerkette befestigt. Über
die Länge und das Gewicht der Ankerkette konnte man einstellen, wie
weit das Fahrzeug über dem Meeresgrund schwebt. Nach dem Abwurf des
ersten Gewichts sank es so lange ab, bis einige Glieder der Ankerkette
auf dem Meeresgrund auflagen. Die aufliegenden Kettenglieder erzeugten
keinen Abtrieb mehr am Fahrzeug, so dass es einen neutralen Auftrieb
aufwies.
Während in der UDSSR durch den einsetzenden Prozess der Perestroika die finanziellen Mittel für weitere Neuerungen knapp wurden, schritt die Entwicklung in mehreren westlichen Staaten weiter voran. In Kanada startete die Firma ISE (International Submarines Engineering Ltd.) die Entwicklung eigener Fahrzeuge für das Militär sowie für industrielle Kunden. Im Jahr 1983 entstand das ARCS (Autonomous and Remote Controlled Submarine). Hierbei handelt es sich um eine offene Prototypenplattform zur Erforschung von neuen AUV-Technologien. Auch heute ist das Fahrzeug noch im Einsatz und wurde unlängst mit einer Aluminium-Sauerstoff-Batterie ausgestattet. Es ist 6,4 Meter lang und 1,3 Tonnen schwer. Der Nachfolger wurde 1992 zusammen mit der US Navy und der Royal Canadian Navy entwickelt. Das AUV Theseus war 10,7 Meter lang und wog 8,6 Tonnen. Eine bedeutende Mission fand im Jahr 1996 statt, als das Fahrzeug in einer 60-stündigen Mission im Einsatz war und unter Eis über eine Länge von 220 Kilometer Glasfaserkabel legte.

AUV AutosubLR vom National Oceanography Centre, Courtesy NOC
Eine weitere AUV-Familie entstand
in England beim National Oceanography Centre (NOC) in Southampton. Im
Jahr 1988 beschloss das Natural Environment Research Council (NERC) die
Entwicklung eines autonomen Unterwasserfahrzeugs anzustoßen und
übertrug die Aufgabe dem NOC. Nach einer sehr langen Entwicklungsphase
von sieben Jahren und dem Aufbau eines ersten Prototypen wurde im Jahr
1996 das AUV Autosub1 gebaut und bis ins Jahr 2000 genutzt. Die
Autosub-Familie gilt heute als eine der modernsten und zuverlässigsten
Fahrzeugfamilien. Dabei wird für jeden Anwendungsfall ein entsprechend
ausgestattetes AUV verwendet. Beispielsweise ist für die Wassertiefe
von 6.000 Meter das Autosub6000 vorhanden. Für geringere Wassertiefen
kann auf das Autosub3 zurückgegriffen werden. Für Langzeiteinsätze wird
das AutosubLR genutzt. Es ist für eine Tauchtiefe von 6.000 Meter
ausgelegt und soll mit einer Batterieladung eine Strecke von 6.000
Kilometer zurücklegen. Bei einer Marschgeschwindigkeit von 0,4 m / s
entspricht dies einer Einsatzdauer von knapp sechs Monaten. Um diese
Reichweite zu ermöglichen, ist das 3,6 Meter lange und 660 Kilogramm
schwere AUV besonders strömungsgünstig aufgebaut und verbraucht sehr
wenig Energie. Die Steuerungselektronik besteht aus sparsamen
Mikroprozessoren, die zwischen den einzelnen Steuerzyklen in einen
Schlafmodus gehen, bei dem der Energieverbrauch minimiert ist.
Heute findet die Weiterentwicklung der AUV-Technik global statt. Fast alle Industriestaaten oder aufstrebenden Wirtschaftsnationen verfügen über eigene Programme, AUVs zu entwickeln oder einzusetzen. Dabei greifen die meisten Anwender allerdings zu Fahrzeugen, die auf ihren Kundenwunsch hin gefertigt werden und passen nur noch die Software und Teile der wissenschaftlichen Ausrüstung an ihre Anforderungen an.
Die aktuellen Marktführer sowohl im wissenschaftlichen als auch im industriellen Bereich sind die Firmen ISE aus Kanada mit ihrer Explorer-Familie, Kongsberg AS aus Schweden mit dem AUV Hugin und die Kongsbergtochter Hydroid Inc. aus den USA mit den Fahrzeugen der REMUS-Familie.
Beispielsweise stammen die beiden
aktuellen Fahrzeuge, die vom IFREMER in Frankreich eingesetzt werden,
von der Firma ISE und sind Teil der Explorer-Familie. Die AUVs Aster X
und Idef X sind 4,5 Meter lang und erreichen eine Tauchtiefe von 3.000
Meter. Die Reichweite der 800 Kilogramm schweren AUVs beträgt 100
Kilometer bei einer Reisegeschwindigkeit von drei Knoten. Um den Umgang
mit den Fahrzeugen zu erleichtern und die Einsatzfähigkeit auch bei
schlechten Wetterbedingungen zu gewährleisten, wurde eigens ein
Ausbring- und Bergesystem für die Fahrzeuge konzipiert. Das
Caliste-System besteht aus einem Bergekäfig, der auf der
Wasseroberfläche schwimmt und in den das jeweilige AUV eingezogen wird.
Anschließend wird der Käfig von einem Arbeitskran an Bord gehoben.
In Deutschland werden für die
Forschung Fahrzeuge der Firma ISE oder Hydroid Inc. eingesetzt. Das
Forschungszentrum für Marine Umweltwissenschaften (MARUM) der
Universität Bremen verwendet ein AUV der Explorer-Familie mit dem Namen
AUV MARUM SEAL. Dabei handelt es sich um ein 5,5 Meter langes und 1,3
Tonnen schweres AUV für eine maximale Tauchtiefe von 5.000 Meter. Das
Helmholtz-Zentrum für Ozeanforschung Kiel (GEOMAR) nutzt ein AUV REMUS
6000 mit dem Namen ABYSS. Das Fahrzeug lässt sich für 22 Stunden
einsetzen und kann eine Tauchtiefe von 6.000 Meter erreichen. Auch für
dieses Fahrzeug ist eine Aussetz- und Bergelösung vorhanden. Diese wird
vom Hersteller angeboten und zieht das Fahrzeug am Bug aus dem Wasser
direkt in einen an einem Portal befestigten Käfig. Sobald das Portal
einschwenkt, wird das AUV auf seiner Ablage abgesetzt.
In Südkorea hat Daewoo Heavy Industries Ltd. mit Unterstützung vom IMTP aus Russland das OKPO 6000 entwickelt. Das torpedoförmige Fahrzeug ist 3,8 Meter lang und 950 Kilogramm schwer und für eine Tauchtiefe von 6.000 Meter ausgelegt. Den Vorschub generieren vier winklig angestellte Schubdüsen am Heck, die auch eine Steuerung des Fahrzeugs ermöglichen. Die Reisegeschwindigkeit beträgt drei Knoten. Nach einem ersten Testlauf, der im Jahr 1996 im Japanischen Meer bei einer Tiefe von 2.300 Meter stattfand, wurde im Jahr 1998 im Pazifischen Ozean ein Tiefseeeinsatz bei 5.000 Meter erfolgreich abgeschlossen.
Denselben Weg ist China bei der Entwicklung der beiden Fahrzeuge CR-01 und CR-02 gegangen. Auch das Sehnyang Institute of Automation of Chinese Academy of Sciences arbeitete eng mit dem IMTP zusammen. Beide Fahrzeuge weisen eine maximale Tauchtiefe von 6.000 Meter auf. Dabei ist die Einsatzzeit des 1997 gebauten und 1,3 Tonnen schweren AUVs CR-01 auf zehn Stunden begrenzt. Das 2001 gefertigte 1,5 Tonnen schwere Fahrzeug CR-02 weist eine maximale Einsatzdauer von 25 Stunden auf. Eingesetzt wurden die Fahrzeuge nicht nur für die üblichen wissenschaftlichen Aufgaben, sondern auch für die Manganknollensuche, von der sich China eine weitere Erschließung von Rohstoffvorkommen erhofft.
Das aktuelle Fahrzeug ist der tauchende Drache (Qianlong I). Auch dieses Fahrzeug erreicht eine maximale Tauchtiefe von 6.000 Meter. Bei einer Länge von fünf Metern ist das AUV 1,5 Tonnen schwer. Die Einsatzdauer des AUVs beträgt über 24 Stunden. Die Entwicklung des tauchenden Drachens begann im Jahr 2010. Nachdem 2012 erste Testfahrten in Seen durchgeführt wurden, konnte das Fahrzeug 2013 zwei erfolgreiche Tauchfahrten im Südchinesischen Meer absolvieren. Die maximale Tauchtiefe, die dabei erreicht wurde, betrug 5.080 Meter. Das Fahrzeug wird eingesetzt, um Karten des Meeresbodens zu erstellen und um Manganknollen zu detektieren.
In Japan begannen die ersten Arbeiten an einem AUV im Jahr 1995. Die Firma Mitsui Engineering and Shipbuilding Co. Ltd. entwickelte das AUV R-One. Dabei handelt es sich um ein acht Meter langes und 4,7 Tonnen schweres Gefährt für Oberflächenfahrten. Angetrieben wird es von einem Dieselmotor mit geschlossenem Kreislauf. Der Antrieb beschränkt die Einsatztiefe auf 400 Meter. Der Nachfolger, das AUV R2D4, welches 2001 gebaut wurde, stellte dann erstmals ein AUV für die Tiefsee dar. Mit einer erlaubten Tauchtiefe von 4.000 Meter, einer Länge von 4,4 Meter und einem Gewicht von 1,6 Tonnen, kann es bei einer Geschwindigkeit von drei Knoten eine Strecke von 60 Kilometer zurücklegen.
Im Jahr 2000 begann die Japan Agency for Marine-Earth Science and Technology (JAMSTEC) zusammen mit der Firma Mitsubishi Heavy Industry Ltd. das mondfischförmige AUV MR-X1 zu konzipieren. Das 2003 fertiggestellte Fahrzeug mit einer Länge von 2,5 Meter und einem Gewicht von 800 Kilogramm verfügt über einen Manipulator, um Arbeiten am Meeresgrund durchzuführen. Die maximale Tauchtiefe des MR-X1 beträgt 4.200 Meter. Bei einer Reisegeschwindigkeit von zwei Knoten ist die Einsatzdauer auf 15 Stunden begrenzt.
Die beiden aktuellen Fahrzeuge der JAMSTEC sind das „working AUV“ Otohime und das „cruising AUV“ Jinbei. Die Planungen zum Otohime begannen im Jahr 2010. Es ist 2,6 Meter lang, 850 Kilogramm schwer und erreicht bei einer Geschwindigkeit von 1,5 Knoten eine maximale Tauchtiefe von 3.000 Meter. Die Einsatzzeit ist durch den druckkompensierten Lithium-Ionen-Akkumulator auf sechs Stunden limitiert. Auch hier befindet sich an der Fahrzeugfront ein Greifarm, mit dessen Hilfe Proben genommen werden können.
Das ebenfalls 2010 entwickelte AUV Jinbei ist drei Meter lang und wiegt zwei Tonnen. Mit einer maximalen Tauchtiefe von 3.000 Meter lässt sich bei einer Reisegeschwindigkeit von zwei Knoten eine Einsatzdauer von zehn Stunden erreichen. Die ersten Testfahrten fanden im Jahr 2012 statt. Dabei wurde zur Sicherheit noch eine Glasfaserverbindung genutzt und eine Tauchtiefe von 1.050 Meter erreicht.
In Deutschland werden neben den von ausländischen Firmen gebauten Fahrzeugen auch eigene Entwicklungen im Bereich der autonomen Unterwasserfahrzeuge vorangetrieben. Im industriellen Sektor sind die Firmen ATLAS Elektronik und Diehl BGT Defence tätig. Die entwickelten AUVs können in militärischen Bereichen wie Seekampfmittelbeseitigung, U-Boot Bekämpfung oder Überwachung und Aufklärung eingesetzt werden. Auf dem Feld der zivilen Forschung entstand in Zusammenarbeit von fünf Fraunhofer-Instituten das Projekt TieTek (Technologiekonzept für Tiefseeinspektion und Exploration), bei dem es um den Bau eines druckneutralen Fahrzeugs ging. Schwerpunkt der Arbeiten war dabei die Entwicklung der Steuerungs- und Führungssoftware.
Am Fachgebiet Mikrotechnik der
Technischen Universität Berlin begann bereits 2006 ein Projekt zur
Entwicklung eines Unterwasserfahrzeugs. Im Verbundprojekt
„Druckneutrale Systeme“ wurde das weltweit erste druckneutrale
Tauchboot, die DNS Pegel, aufgebaut. Die Verwendung der neuartigen
druckneutralen Bauweise, bei der auf kostenintensive Druckhüllen
verzichtet wird, ermöglicht es, ein kostengünstiges Fahrzeug für
beliebige Tauchtiefen aufzubauen. Der Prüfdruck, für den dieses
Fahrzeug und seine Komponenten ausgelegt wurden, liegt bei 600 bar, was
einer Tauchtiefe von ungefähr 6.000 Metern entspricht.
DNS Pegel, Fachgebiet Mikrotechnik der Technischen Universität Berlin
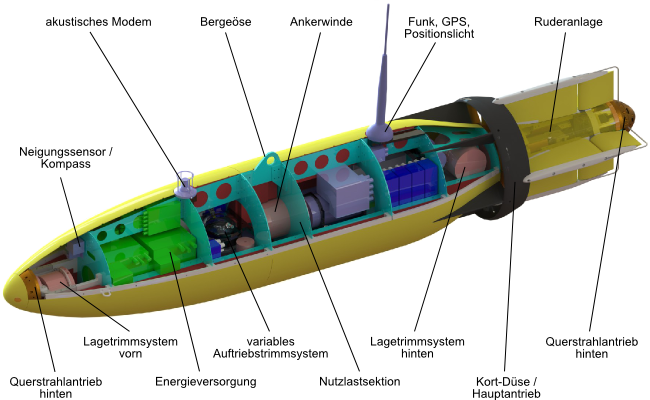
Neben der druckneutralen Bauweise
betrat man auch in den Bereichen Antrieb und Querstrahlsteuer Neuland.
Der
Ringpropeller, der von einer Düse umgeben wird, besitzt in Verbindung
mit der strömungsgünstigen Form einen hohen Wirkungsgrad. Die
Querstrahlsteuer ermöglichen eine Querbewegung des Fahrzeugs ohne
Einsatz der Ruderanlage oder des Hauptantriebs. Dabei weisen sie,
verglichen mit konventionellen Quersteuern, einen kleineren
Strömungswiderstand auf. Die Schubleistung ist trotz des verringerten
Bauraums vergleichbar mit einem Tunnelquersteuer.

DNS Pegel an Bord eines Forschungsschiffs
Bei insgesamt neun Forschungsfahrten auf der Ostsee konnte die Eignung der druckneutralen Technik für ein autonomes Unterwasserfahrzeug nachgewiesen werden. Im Nachfolgeprojekt „Druckneutrale Systeme für die Tiefsee“ galt es, diesen Erfolg mit einem weiteren Fahrzeug zu wiederholen und erstmals im Atlantischen Ozean Testfahrten durchzuführen. Das AUV PreToS ist wesentlich größer und schwerer als die DNS Pegel und weist in seiner Form eine weitere Besonderheit auf. Um den Strömungswiderstand noch weiter zu senken und damit die Einsatzzeit zu erhöhen, ist die äußere Form der PreToS Pinguinen nachempfunden. Diese besonders strömungsgünstige Form senkt den Widerstand bei der Reisegeschwindigkeit um fast zehn Prozent gegenüber der Laminarspindelform der DNS Pegel.

AUV PreToS während der Wartung auf einem Forschungsschiff
Die Struktur der Fahrzeuge ist durch einen Titanrahmen vorgegeben, der an die Fahrzeugbelastungen angepasst ist. An dem Titanrahmen werden die auftriebserzeugenden syntaktischen Schaumkörper sowie alle Einbaukomponenten befestigt. Die äußere Form bildet eine ABS-Hülle. Eine Weiterentwicklung zum Vorgängerfahrzeug fand weiterhin bei der Aufteilung des Auftriebsmaterials statt. Während beim DNS Pegel die auftriebserzeugenden Körper gleichmäßig über das Fahrzeug verteilt sind, findet beim AUV PreToS eine Kumulierung in der oberen Hälfte statt. Dies stabilisiert die Lage des Fahrzeugs im Wasser und vermindert eine Rollbewegung. Ein weiteres Unterscheidungsmerkmal der Fahrzeuge betrifft den Hauptantrieb. Um eine induzierte Drehung des Fahrzeugs zu vermeiden, wurden beim AUV PreToS zwei kontarotierende Hauptantriebe direkt hintereinander eingebaut. Der induzierte Drall des ersten Motors wird durch den zweiten wieder aufgehoben.
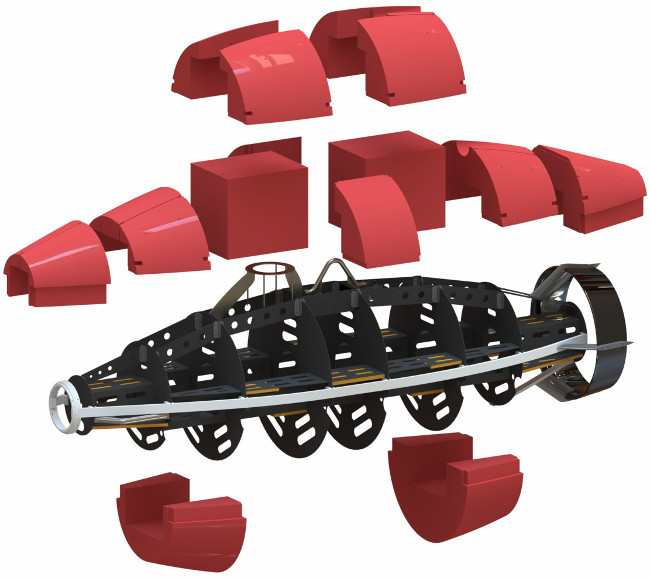
Aufbau des AUVs PreToS
Das AUV PreToS konnte seine Eignung in der Ostsee sowie im Atlantischen Ozean nachweisen. Durch seine hochdynamische Form ist es ein sehr schnelles und wendiges Fahrzeug, das aufgrund der druckneutralen Technik für sehr große Tauchtiefen geeignet ist. Die offene Bauweise unterstützt dabei gleichzeitig einen schnellen Zugang zu den Einbaukomponenten und somit eine schnelle Wartung und Anpassung auf verschiedene Missionen. Insgesamt betrachtet stellt das Fahrzeug den nächsten Evolutionsschritt bei der Entwicklung von autonomen Unterwasserfahrzeugen dar.
AUV PreToS während einer Testfahrt im Atlantischen Ozean

DNS Pegel mit aktiviertem Hauptantrieb während einer Testfahrt in der Ostsee

Forschungsschiffs
Elisabeth Mann Borgese auf der Ostsee,
Fotoaufnahme aus der Sicht des gerade aufgetauchten AUVs PreToS
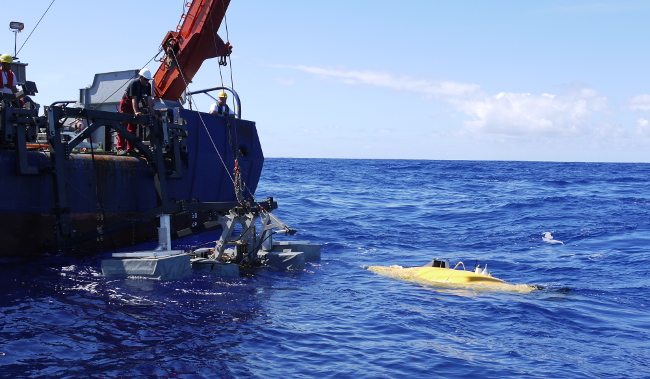
Erprobung
des AUVs PreToS mit dem dafür entwickelten
Ausbring- und Bergesystem im Atlantischen Ozean

AUV PreToS im Atlantischen Ozean
Die aufregende Entwicklung der AUVs und weitere, technische Themen sind ausführlich in meiner Dissertation beschrieben:Abhandlungen
über den Aufbau, den Nutzen und den Betrieb
autonomer
Unterwasserfahrzeuge
die im Rahmen des Forschungsprojekts „Druckneutrale Systeme für die Tiefsee“ entstanden ist.
Mein Dank gebührt Herrn Prof. Dr. rer. nat. Heinz Lehr für die Möglichkeit, an diesem einzigartigen Projekt mitzuarbeiten und mit den gewonnenen Resultaten zu promovieren.
Recht herzlich danken möchte ich meinen Kollegen Dr. Johannes Gelze, Dr. David Mischnick, Dr. Eugen Olenew, Dr. Oliver Preradovic und Dr. Tino Schmidt für die kollegiale Zusammenarbeit.
Projektpartner im Forschungsverbund „Druckneutrale Systeme für die Tiefsee“ waren:
ENITECH Energietechnik Elektronik GmbH, Bentwisch / Rostock
EvoLogics GmbH, Berlin
Fachgebiet Mikrotechnik der Technischen Universität Berlin
Leibniz-Institut für Ostseeforschung Warnemünde
Dem Bundesministerium für Wirtschaft und Technologie / Projektträger Jülich sei für die finanzielle Förderung dieses Projekts gedankt.
Förderkatalog: foerderportal.bund.de |
Förderkennzeichen: 03SX276A |