Führungssystem für minimal-invasive Verfahren
Dr.-Ing. Stefan Oginski
--
Eine mechanische Endoskophalterung kann die Aufgaben des menschlichen Kamera- Assistenten übernehmen, wenn sie eine bedarfsgerechte, flexible und arretierbare Endoskoppositionierung ermöglicht sowie auch die Variation der Blickrichtung zulässt.
Speziell zur Instrumentenhalterung sind am Markt eine Reihe kompakter Systeme erhältlich, die sich grundsätzlich in mobile und tischbefestigte Vorrichtungen unterteilen lassen. Die dort eingesetzten Arretierungsmechanismen gehen von mechanischen über pneumatische und elektrische bis hin zu hydraulischen Varianten. Vergleichbare Halterungssysteme werden von vielen Herstellern angeboten. Deckenhalterungssysteme sind jedoch, trotz zahlreicher Patente, kaum kommerziell erhältlich.
Da mobile und tischbefestigte Systeme den Bewegungsraum des Chirurgen um den OP-Tisch einschränken sowie weiterhin durch Versorgungsleitungen Behinderungen auftreten, wurde am Fachgebiet Mikrotechnik der Ansatz verfolgt, eine Deckenhalterung für Endoskope zu konzipieren.
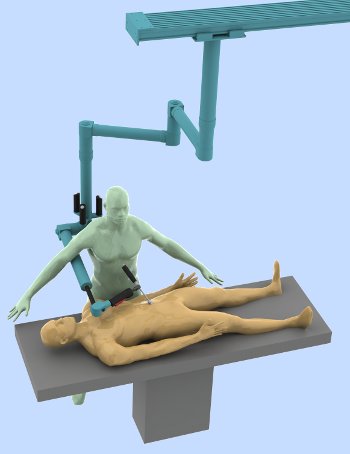
Das im Körper manövrierbare Endoskop ist
extrakorporal an einem Haltearm befestigt, welcher die Raumrichtung
vorgibt. Der Arm besteht aus mehreren Segmenten, die über drehbare
Gelenke miteinander verbunden sind. Jedoch sind die Gelenke nur
während der Betätigung eines Bedienelements beweglich und
bleiben ansonsten fixiert. Sie basieren auf Federdruckbremsen, die sich
pneumatisch über elektrisch schaltbare Ventile lösen lassen.
Als Druckluftquelle dient das in Krankenhäusern üblicherweise
vorhandene 6 bar-Netz. In den Gelenken sind
Drehdurchführungen für die Druckluftleitungen und
Schleifringe für die elektrischen Leitungen integriert, so dass
sich die Gelenke frei, ohne störenden Endanschlag, drehen lassen.
Der gesamte Haltearm lässt sich motorgesteuert über ein
längs zum OP-Tisch an der Decke verlaufendes Schienensystem
verfahren und daher bei Nichtgebrauch unkompliziert aus dem
unmittelbaren Operationsfeld entfernen. Im Zusammenspiel
ermöglichen es diese Verstelleinheiten dem operierenden Arzt, die
gesamte Halterung je nach Bedarf mit geringem Aufwand innerhalb oder
außerhalb der „Patientenwolke“ zu platzieren.

Die Feineinstellung der Endoskopposition erfolgt über den unteren Teil des Haltearms. Dieser ist analog zum oberen Teil aus gelenkig verbundenen Segmenten aufgebaut, welche ebenfalls bei Betätigung eines Bedienelements beweglich sind. Dieses ist am distalen Ende angebracht und von dem Bedienelement des oberen Armteils unabhängig.
Weiterhin ist ein Drehaktor in der Haltevorrichtung integriert, mit dem sich der Endoskopschaft motorisch drehen lässt und somit die gewünschte Variation der Blickrichtung bei Seitenblickendoskopen ermöglicht wird.

Das Zusammenwirken von Vor- und Feinpositionierung bietet maximale Mobilität bei gleichzeitiger Präzision. Wird keines der Bedienelemente aktiviert, ist das Endoskop zuverlässig in seiner Lage fixiert. Gegenüber mobilen Halterungssystemen, die in der Regel über ein Fahrgestell mit den Abmaßen eines Beistelltischs verfügen, bietet die deckenseitige Befestigung für das OP-Personal volle Bewegungsfreiheit. Durch die große Mobilität und den minimalen Positionieraufwand der Deckenhalterung ergeben sich auch im Vergleich zu Haltevorrichtungen, die an den Profilen des OP-Tischs montiert sind, erhebliche Vorteile des hier vorgestellten Haltesystems. Die Führung der Instrumentenkabel und -schläuche lässt sich einfach über die Decke gestalten, wodurch sich Stolperfallen vermeiden lassen und der Reinigungsbedarf reduziert wird.
Wesentliche Bestandteile der Entwicklung:
• Untersuchung zu unterschiedlichen Gelenktypen und deren Ansteuerung
• Materialuntersuchungen für den Gesamtaufbau
• Entwicklung der Schnittstelle steril / unsteril
• Integration des Endoskops in die Haltevorrichtung
• Aufbau des Endoskop-Haltesystems
----

--

Großes Interesse am Endoskophaltearm zeigten die Fachbesucher während der
MEDICA 2010, der größten Medizintechnik-Messe der Welt
Projektförderung
Endoguide ist ein Teilprojekt der Innovationsallianz Virtuelle Techniken, gefördert vom Bundesministerium für Bildung und Forschung / Deutsches Zentrum für Luft- und Raumfahrt mit einem Gesamtvolumen von über 6 Millionen Euro.
 |
Projektförderung |
 |