Neuartiger positionsgeregelter Linearantrieb
|
Die
Drehbewegung eines Schwenkprismas an der Spitze eines Endoskops erlaubt
dem Arzt einen Winkelbereich von 90 Grad im Seitenblick zu
überstreichen. Diese Drehbewegung erfolgte bisher manuell durch den
Chirurgen, so dass dessen Hände für den Eingriff nicht zur Verfügung
standen. Dagegen erlaubt ein neuartiger positionsgeregelter Linearaktor
die motorisierte Änderung der Blickrichtung während einer Operation.
Der behandelnde Chirurg erhält somit die Möglichkeit, über die Kopplung
mit Mensch-Maschine-Schnittstellen, beispielsweise durch Kopf-, Augen-,
Gesten- oder Sprachsteuerung, den Blickwinkel zu variieren.
Der Lineardirektantrieb befindet sich am proximalen Ende des Endoskops und bringt Stellkräfte in Richtung xA auf, um über eine Zug-Druck-Draht-Kopplung die Winkeleinstellung φm des Schwenkprismas an der Endoskopspitze durchzuführen. Über Hallsensoren im Stator des Antriebs lässt sich die Aktorposition präzise messen und damit auch regeln.
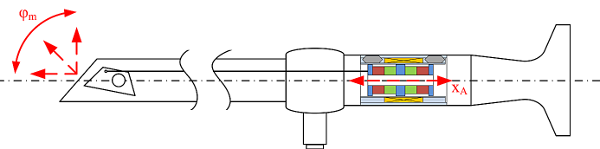
Schwenkprismenendoskop mit einem geregelten Linearantrieb
Die Entwicklung der Linearantriebe erfolgte anhand von Finite-Elemente-Modellrechnungen mit dem Programm ANSYS Maxwell. Dabei wurden der Verfahrweg des Läufers, die Antriebskraft und die magnetische Induktion im Hallelement sowie deren Änderung geeignet angepasst. Diese wichtigen Größen lassen sich nicht getrennt voneinander optimieren. Es ist vielmehr eine ganzheitliche Betrachtung des magnetischen Kreises erforderlich.
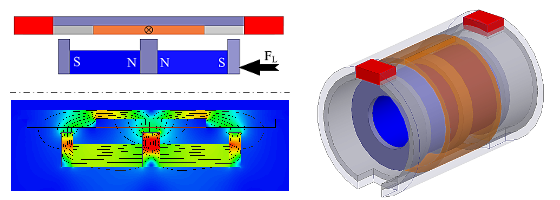
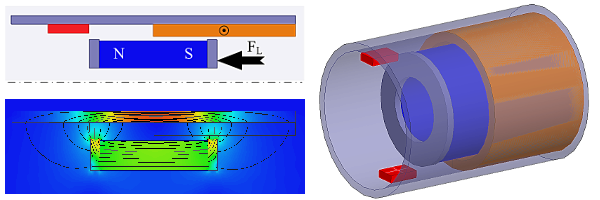
Modell für FE-Rechnungen: 2D-Modell (links) und 3D-Modell (rechts)
Zwei Permanentmagnete in Reihe erzeugen in der Kupferspule des Stators die magnetische Induktion für den Antrieb des Läufers. Die Hallsensoren (rot eingefärbt) befinden sich radial angeordnet in symmetrisch ausgefrästen Nuten an den axialen Enden des Stators.
Der Antrieb ist so ausgelegt, dass im stromlosen Zustand keine axial gerichteten Reluktanzkräfte wirken. Wird die Spule des Antriebs mit einem elektrischen Strom versorgt, entsteht eine Lorentzkraft, die den Läufer unabhängig von dessen Position je nach Stromrichtung nach links oder rechts beschleunigt.
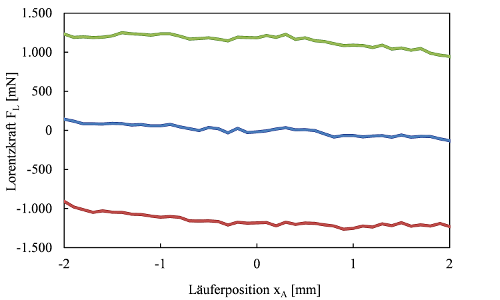
Kraft-Weg-Kennlinie des Antriebs
Eine gesteuerte Positionierung des Läufers über die Stromstärke ist nicht möglich. Für eine genaue Bestimmung und Einstellung der Position wird die Magnetfeldmessung durchgeführt, da sich die magnetische Induktion im Hallsensor wegabhängig verändert.
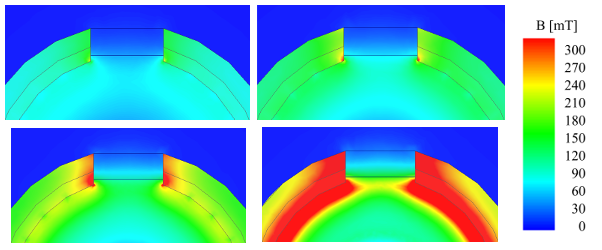
Magnetische Induktion in der Sensorebene
für die Läuferpositionen 0,5 mm, 1,0 mm, 1,5 mm, 2 mm
Nach dem Aufbau des ersten Prototypen entstand ein zweites Funktionsmuster, welches deutlich kompakter ist als der erste, da im Läufer nur noch ein Permanentmagnet eingebaut ist. Die magnetische Induktion wird mit Hilfe von zwei miniaturisierten Hallsensoren in SMD-Bauweise (Surface Mounted Device) gemessen, woraus sich die Position des Läufers bestimmen lässt.
Modell für FE-Rechnungen: 2D-Modell (links) und 3D-Modell (rechts)
Die Bestimmung der Ist-Position xA(t) dient als Grundlage für die geregelte Bewegung des Läufers. Die Positionsabweichung e(t) berechnet sich aus der Differenz der Soll- und der Ist-Position. Aufgrund dieser Abweichung leitet der Regler einen Verstellvorgang ein, der zur Reduktion der Regelabweichung führt. Die Stellgröße uS(t) zur Erzeugung einer Lorentzkraft im Linearantrieb wird je nach Regleraufbau unterschiedlich berechnet.
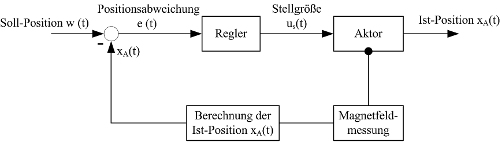
Regelkreis zur Positionsregelung des Linearantriebs
Für die Fertigung der Komponenten des Antriebs kamen konventionelle Methoden der Feinwerktechnik zum Einsatz. Neben Feindrehen und Fräsen für die spanende Verarbeitung wurden die Gleitflächen poliert. Die Spulen wurden mittels Linearwickeltechnik hergestellt.
Der erste Antrieb besteht aus einem festen Stator und einem beweglichen Läufer. Der Zugdraht des Schwenkprismas ist mit dem Läufer verbunden. Die beiden Hallsensoren zur Magnetfeldmessung sind über eine Platine miteinander verschaltet und am Rückschlussrohr des Stators angebracht.
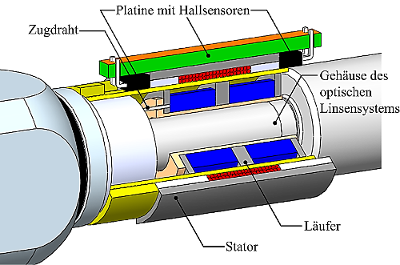
CAD-Modell des ersten Funktionsmusters des Linearantriebs im Endoskop
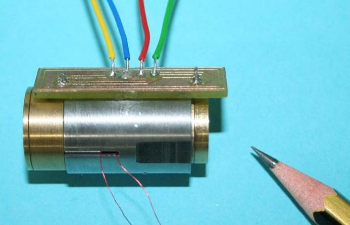
Erstes Funktionsmuster des Linearantriebs
Nach der Fertigstellung des ersten Linearantriebs erfolgte dessen experimentelle Untersuchung. Sodann wurde der zweite, deutlich kleinere Prototyp aufgebaut.
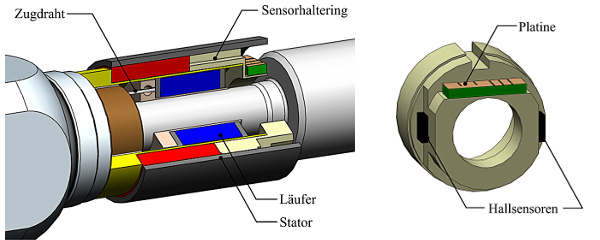
CAD-Modell des zweiten Funktionsmusters im Endoskop (links),
Sensorhaltering mit Hallsensoren und Versorgungsplatine (rechts)
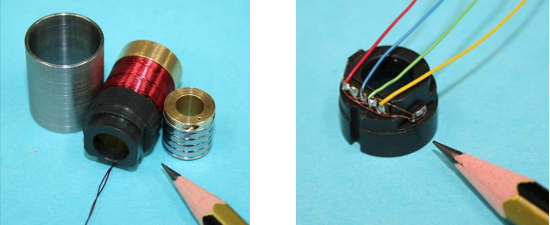
Zweites Funktionsmuster: Stator und Läufer (links),
Sensorhaltering mit SMD-Hallsensoren (rechts)
Umfangreiche Funktionstests zur Ermittlung der Positioniergenauigkeit zeigen, dass ein präzises Einstellen des Prismenwinkels zur Steuerung der Blickrichtung des Endoskops mühelos gelingt.
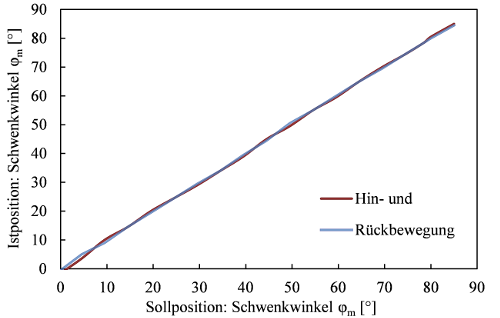
Gemessener Schwenkwinkel φm bei vorgegebener Sollposition,
Positionsregelung mit Aktor