Druckneutrale Trimmvorrichtung
|
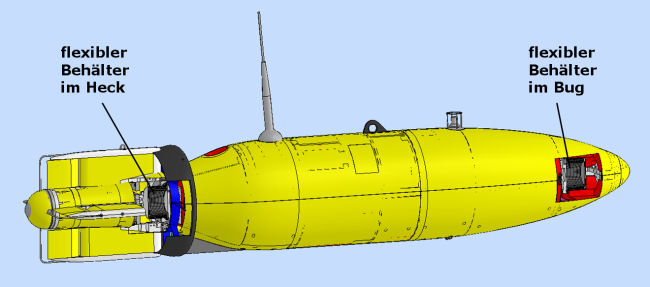
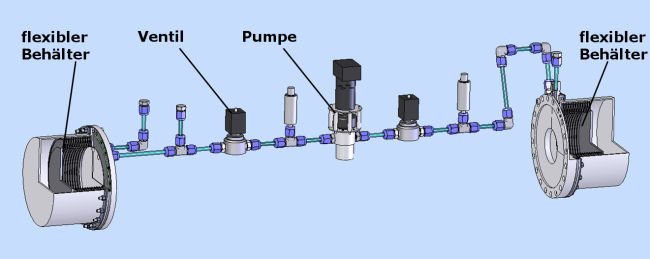
Bei der vom BMWi geförderten Entwicklung eines miniaturisierten, druckneutralen Unterwasserfahrzeugs wird ein Lagetrimmsystem benötigt, mit dem sich bei Geradeausfahrt die waagerechte Lage und beim Tauchen eine Neigung einstellen lässt. Hierzu befördert eine Hydraulikpumpe Flüssigkeiten mit deutlich von Wasser verschiedenen Dichten zwischen dehnbaren Behältern, die sich am Bug und Heck des Fahrzeugs befinden (vgl. Abbildungen). Durch die Verlagerung des Schwerpunkts lässt sich insbesondere die Wirkung der Höhen- und Tiefenruder beim Tauchvorgang energieeffizient unterstützen. Das System ist so ausgelegt, dass es in Tauchtiefen bis zu 6.000 Metern sicher funktioniert.
Viele Unterwasserfahrzeuge sind mit beweglichen
Greifwerkzeugen (Manipulatoren) oder Forschungsgeräten
ausgestattet, deren Betrieb bei Unterwasserarbeiten den Schwerpunkt des
Fahrzeugs verändert. Ein Neigungssensor registriert die
Nickbewegungen und liefert für ein Regelsystem den Lagewinkel, das
den dynamischen Ausgleich herstellt.
Manchmal ist es zwingend notwendig, bei Tauchmissionen
zusätzliche Geräte in einem bestimmten Teil des Fahrzeugs
unterzubringen. Das Trimmsystem gleicht die Verschiebung des Gewichts-
bzw. Auftriebsschwerpunkts aus und regelt die horizontale Lage des
Boots im Wasser.
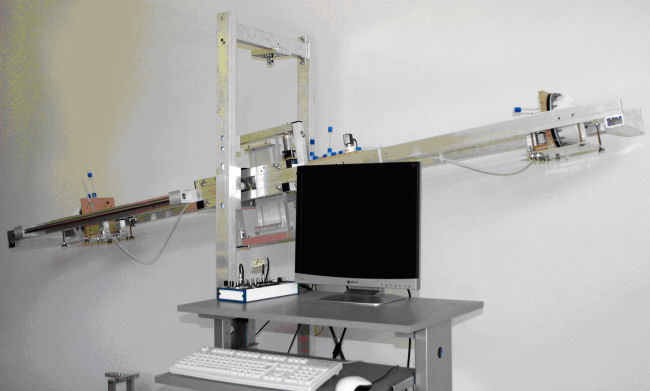
Um die Dynamik des Mess- und Regelkreises zu erfassen, haben wir ein Modellsystem aufgebaut (siehe Abbildung), mit dem sich Schwerpunktsänderungen gezielt einstellen und ausregeln lassen.
Eigenschaften des Lagetrimmsystems:
• seewasserbeständig
• einsatzfähig bis zu Außendrücken von 600 bar
• Kompensation von Störgrößen durch Neigungsregelung
Projektförderung
Bundesministerium für Wirtschaft und Technologie
Projektträger Jülich
Projektpartner
ENITECH Energietechnik Elektronik GmbH, Bentwisch
Leibniz-Institut für Ostseeforschung Warnemünde, Rostock