|
Logbuch der Fahrten während des
Forschungsprojekts
„Druckneutrale Systeme für die Tiefsee“
Genese des AUVs PreToS
von
Dipl.-Ing. Romon Chakrabarti
Das Projekt startete am 1. Oktober 2009, gefördert durch das Bundesministerium für Wirtschaft und
Technologie, Projektträger Jülich (PTJ). Am 31. Dezember 2013
waren die Entwicklungsarbeiten am AUV PreToS
abgeschlossen.
Wir danken dem PTJ für Fördermittel in Höhe von
1.426.622 Euro zur Finanzierung der Gehälter der beteiligten
TU-Wissenschaftler und der umfangreichen Material-, Sach- und
Reisekosten.

An diesen faszinierenden Reisen in / für die
maritime Technik waren beteiligt:
unser Chef und Leiter des Fachgebiets
Mikrotechnik der Technischen Universität Berlin:
Prof. Dr. rer. nat. Heinz Lehr
unser Kaleu (Projektleiter I):
Dipl.-Ing. Tino
Schmidtunser 1. Offizier (Projektleiter II):
Dipl.-Phys. /
Dipl.-Ing. Johannes Gelzedie Offiziere (Ingenieurs-Crew):
Dipl.-Ing. Romon Chakrabarti, Dipl.-Ing. Kilian Helfmeier,
Dr.-Ing.
David Mischnick, Dr.-Ing. Stefan Oginski,
Dr.-Ing. Eugen Olenew,
Dr.-Ing. Oliver Preradović
das handwerkliche Team in
unserer Werkstatt sowie hauseigenen „Werft“:
Meister Detlef Schnee
Industriemechaniker Kevin Ehling und Abdallah
El-Mallah
Informationselektroniker Mario Runge
zu unterschiedlichen Einsätzen (Diplom-, Bachelor-
und Masterarbeiten)
die Matrosen (Studierenden):
Paul Ahrenberg, Max Fandrich, Jonas Forster,
Michael George, Andy Große,
Gregor Gwalt, Ralph Carsten Hartmann,
Sergei Janzen, Gleb Klein, Lars Koopmann,
Mattias Köppen, Anton
Kropinski, Daniel Lucht, Philipp Nather, Christoph Nicolai,
Josef
Schmidt, Michel Joop van der Schoor, Johannes Schulz, Christian
Seidel, Matthias Weber
Dank gilt unseren Projektpartnern:
ENITECH Energietechnik - Elektronik GmbH /
Bentwisch, Rostock
EvoLogics GmbH / Berlin
IOW Leibniz Institut für Ostseeforschung
Warnemünde
Die speziellen Detailarbeiten unserer
Projektpartner sind an dieser Stelle nicht aufgezählt.
Hierfür sei auf deren eigene Webseiten verwiesen.
Zur Chronologie des
Logbuchs:
Das Logbuch beginnt mit den aktuellen Fahrten,
für die Vergangenheit bitte weiter unten nachsehen.
16. bis 22. Dezember
2013
Ostseefahrt,
Forschungsschiff Elisabeth Mann Borgese
Zielgebiet: Darßer Schwelle und
Oderbucht
Auf der letzten Fahrt des Tiefseeprojekts wurde
das AUV zusammen mit dem Auftriebstrimmsystem in der Ostsee
erprobt. Dabei bestand das Ziel, verschiedene Nickwinkel einzustellen und die
Trimmkapazität des Auftriebstrimmsystems zu überprüfen.
Das System
funktioniert: aktives Tauchen in der Ostsee
9. bis 10. Dezember
2013
Schlepprinne der
Technischen Universität Berlin
Die Integration des Auftriebstrimmsystems in das
AUV ist abgeschlossen. In der Schlepprinne wurden erste Versuche
durchgeführt, um mit einem funktionierenden System an der Ostseefahrt ab 16. Dezember 2013 teilzunehmen.
Gleichmäßiger
Tauchprozess durch Fluten
der Auftriebskammern in der Schlepprinne
Nickwinkeltests durch variables Fluten
der vorderen und hinteren Auftriebskammer
15. September bis 4.
Oktober 2013
Atlantikfahrt mit
dem Forschungsschiff Poseidon
Zielgebiet: 32° Nord, 22° West,
westlich von der nordafrikanischen Küste
Bei dieser letzten Atlantikfahrt im Projektzeitraum sollte die PreToS
unter Kontrolle des akustischen Modems Tieftauchversuche
unternehmen. Weitere Ziele betrafen die Vermessung von
Temperaturgradienten im Wasser anhand von empfindlichen Sensoren.
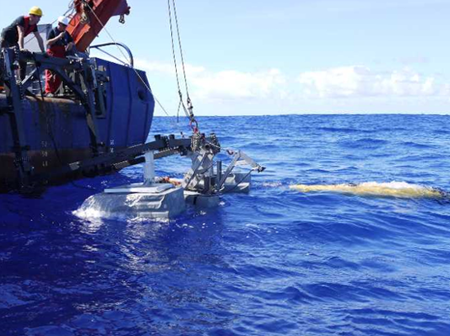
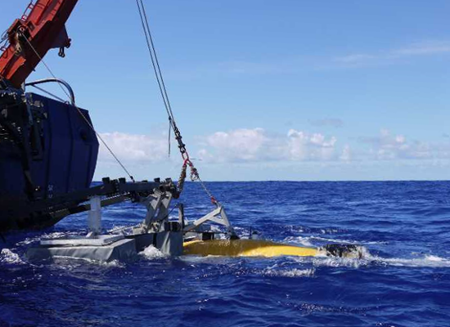
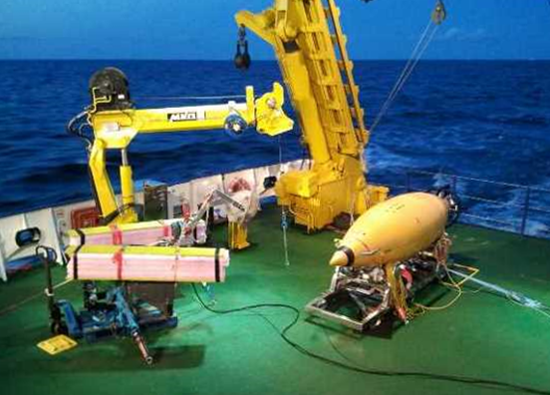
Auch das LARS kam auf dem Atlantik zum Einsatz. Die PreToS
wurde bei Wellengang mit dem LARS ausgesetzt und wieder
erfolgreich aufgenommen. Das neuartige Launch and Recovery System
hat sich im Einsatz bewährt und verkörpert damit eine technische
Einheit und Novität, welche Aussetz- und Bergemanöver von AUVs bei hohem
Wellengang ermöglicht.
Leider gab es bei einem Tieftauchversuch einen
Wassereinbruch in einer Verbindungseinheit des
Kommunikationssystems, so dass ein Kurzschluss auftrat. Aufgrund
des positiven Trimms tauchte das Boot jedoch auf und konnte
erfolgreich geborgen werden.
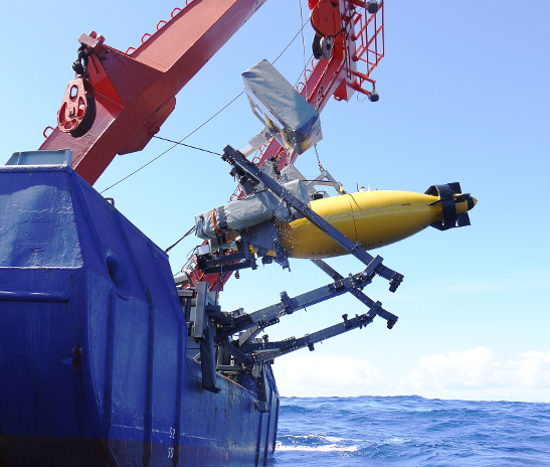
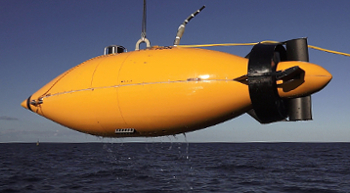
Aussetzen der PreToS
mit dem Launch and Recovery System bei Wellengang

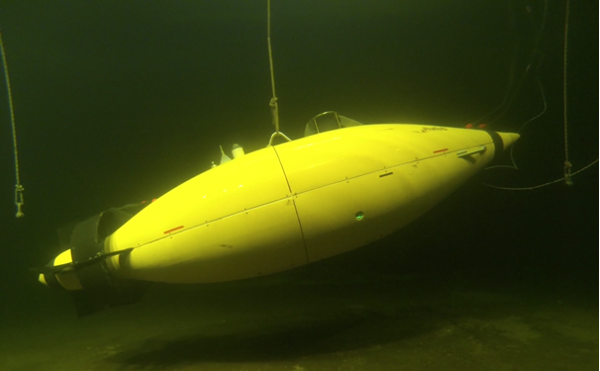
Oberflächenfahrt und
Tauchversuch
Die PreToS wird
wieder an Bord gehievt

Einholvorgang beendet
Die
typischen Einsatzgebiete für Forschungsschiffe in der Ostsee sind
ungefähr 40 Meter tief. Auf dieser Atlantikfahrt erreichte das AUV
jedoch erstmals eine Tiefe von 235 Meter. Dabei wurden über drei
Seemeilen zurückgelegt.

Optimierungsarbeiten und Umrüsten der PreToS
vor dem nächsten Tauchgang
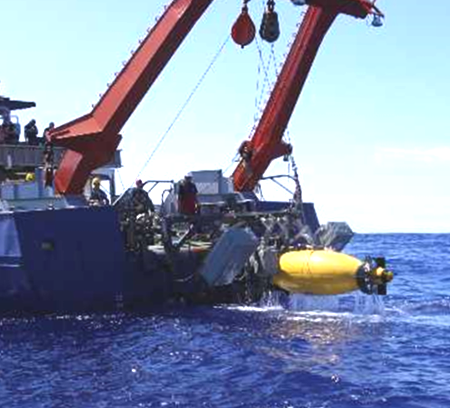
Aussetzen der PreToS,
hier mit einem Seitenkran

Das U-Boot wird mit
Hilfe des LARS in das Meer ausgesetzt

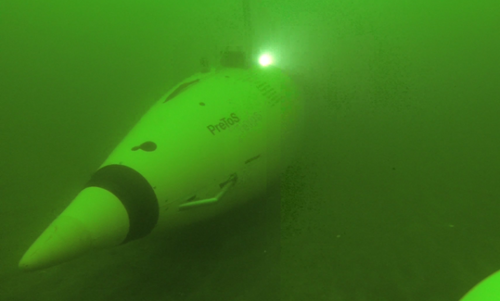
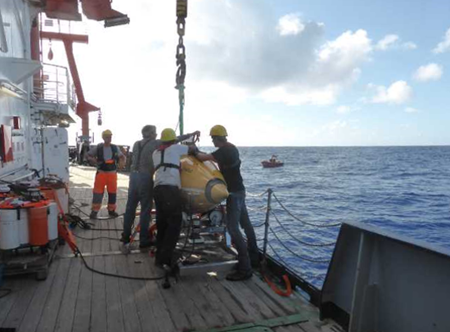
Die PreToS kurz vor dem
Tauchen
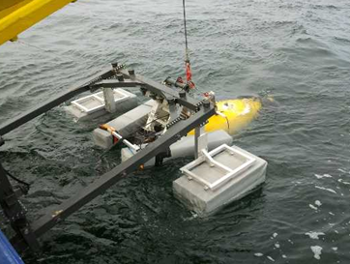
Die PreToS wird in den Käfig gezogen...
... und dort fest verankert

Einholen der PreToS
mit dem LARS
12. bis 17. August 2013
Ostseefahrt mit
dem Forschungsschiff Elisabeth Mann Borgese
Zielgebiet: Darßer Schwelle,
Oderbucht
Zur Vorbereitung auf die Atlantikfahrt wurde das
LARS zusammen mit dem AUV PreToS in der Ostsee erprobt, da sich
beim Aussetzen und Einholen des AUVs immer wieder Schwierigkeiten
zeigten. Diese Vorgänge müssen immer zuverlässig funktionieren.
Sie wurden deshalb so lange wiederholt, bis sie ausfallsicher
abliefen.

Erfolgreiche Einhol-
und Aussetzmanöver mit dem LARS
Die PreToS ist im
Käfig fixiert, Lösen der Verriegelung
Bei früheren Fahrten wurde das AUV mit einem Kran
über die Seite des Forschungsschiffs ausgesetzt und auch wieder
eingeholt. Hierbei kam es der Bordwand oft sehr nahe und
kollidierte häufig mit dieser. Abstehende Bauteile wurden dabei
beschädigt. Durch das LARS ist ein Pendeln des AUVs am Kran nicht
möglich. Die Schwenkwege sind durch den Stahlrahmen vordefiniert.
Dies erhöht die Sicherheit für die Decksmannschaft auf See. Eine
Kollision des AUVs mit der Bordwand des Forschungsschiffs ist
ausgeschlossen, da sich der Bergevorgang entfernt vom
Forschungsschiff vollzieht.

Einbringphase, der
A-Kran hievt die PreToS an Deck

An Bord steht die Helling zur Aufnahme des U-Boots bereit
9. August 2013
Tests im Rostocker
Hafen, Revier an der Alten Feuerwache II
Nach sorgfältiger Neuverdrahtung der
Kommunikationsleitungen, bei der vor allem die Abschirmungen einen
zentralen Erdungspunkt erhielten, erfolgten wiederum
Oberflächentestfahrten bei hoher Fahrtgeschwindigkeit. Dabei
zeigten sich keine Ausfälle.
Alle Fahrbefehle ließen sich
problemlos in entsprechende Manöver umsetzen.
10. bis 11. Juli 2013
Tests im Rostocker
Hafen, Revier an der Alten Feuerwache II
Bei weiteren Testfahrten im Hafenbecken wurde die inertiale Navigationseinheit (IMU) in das AUV eingebaut.
Dabei erfassen die Beschleunigungs- und Winkelsensoren der IMU das
dynamische Fahrverhalten des AUVs. Ziel ist es, bei möglichst
vielen Fahrten Messdaten zu erhalten, um die Sensorfilter
einzustellen. Nur dadurch kann später eine zuverlässige Navigation
unter Wasser erfolgen.
3. bis 5. Juli 2013
Tests im Rostocker
Hafen, Revier an der Alten Feuerwache II
Das AUV wird im Hafenbecken ausgesetzt, um
Oberflächenfahrten zu absolvieren. Dabei galt das Hauptaugenmerk
dem Kommunikationssystem des AUVs, da bei Testfahrten und bei
höheren Umdrehungszahlen des Hauptantriebs häufig Störungen und
Ausfälle auftraten.
14. bis 20. Juni 2013
Ostseefahrt mit
dem Forschungsschiff Elisabeth Mann Borgese
Zielgebiet: Darßer Schwelle und
Oderbucht
Auf dieser Fahrt wurde erstmals das Launch and
Recovery System (LARS) zusammen mit dem AUV auf der Ostsee
erprobt. Insgesamt bewährte sich das System, und es gelangen
erfolgreiche Aussetz- und Bergemanöver.

Das Aussetzmanöver wird vorbereitet

Der Käfig mit der PreToS wird durch den A-Kran geschwenkt,
gleich geht's ins Wasser

Der A-Kran des Forschungsschiffs
setzt den Käfig mit der PreToS auf das Wasser

Freisetzen der PreToS aus dem Käfig
Überwachung der
Freisetzung des U-Boots
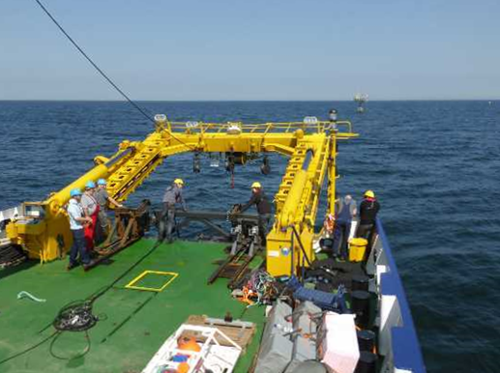
Das LARS besteht aus dem Bergekäfig, einem
Stahlrahmen mit Drehgelenken und zwei fest am Schiff angebrachten
Lagerböcken. Der Stahlrahmen bildet die Verbindung des Bergekäfigs
zu den Lagerböcken. Der Bergekäfig, in dem das AUV
fixiert ist, wird mithilfe einer Winde des A-Rahmens gehoben, achtern
heraus geschwenkt und durch Fieren des Kranseils in das Wasser
abgelassen. Über Handseilwinden wird der Bolzen an der AUV-Öse
zurückgezogen, und das AUV fährt rückwärts aus dem Käfig heraus. Da
am AUV noch weitere Arbeiten durchgeführt wurden, diente bei
dieser Fahrt das AUV-Dummy als Versuchskörper.
6. bis 7. Juni 2013
Tests im Rostocker
Hafen, Revier an der Alten Feuerwache II
Erstmals nach dem Unfall im September 2012 absolvierte das AUV Oberflächenfahrten im Hafenbecken an der Alten
Feuerwache II in Rostock. Nach der Havarie wurde der Neuaufbau des U-Boots dazu
genutzt, viele kleine Verbesserungen vorzunehmen. Daher musste der
Betrieb mit dem überarbeiteten U-Boot getestet werden, bevor eine erneute
Ostseefahrt stattfinden konnte.

Die PreToS auf dem Transportwagen, Vorbereitungen für die Testfahrt
31. Mai 2013
Schlepprinne der
Technischen Universität Berlin
Nach
der Reparatur des AUVs war es erstmals möglich, das Bergemanöver und
die Einkopplung in den Käfig zu erproben. Dabei zeigte es sich, dass
das AUV infolge seiner Länge und Masse bei Wellenbewegung und Querlage
nur mit erheblichen Anstrengungen die korrekte Position für die
Fixierung erreichte. Infolge dessen war es erforderlich, den Eingang
des Bergekäfigs umzugestalten.

Die PreToS wird mit dem Käfig auf die Helling gesetzt
Ziel: Transport zur Schlepprinne

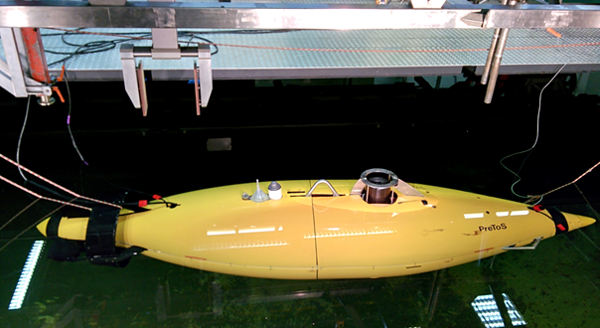
Das U-Boot liegt in der Schlepprinne und wird
für die kommenden Bergemanöver getrimmt

Verlagern von Auftriebsmaterial für den Trimmvorgang

Eingriffe am Bug der PreToS zur Aufnahme von Trimmgewichten
1. bis 22. Mai 2013
Atlantikfahrt mit
dem Forschungsschiff Poseidon
Zielgebiet: 32° Nord, 22° West,
westlich von der nordafrikanischen Küste
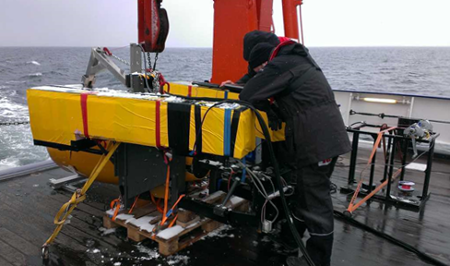
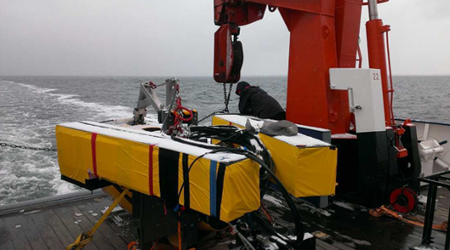
Auf dieser Atlantikfahrt galt es, die nach
eingehender Überarbeitung verbesserten Einbaukomponenten erneut
den rauen Bedingungen des Ozeans auszusetzen, um damit letzte
Sicherheit über deren Funktions- und Einsatzfähigkeit für den
folgenden Einsatz des kompletten AUVs zu erlangen.
Aussetzen des Trimmsystems zur Erprobung in der Tiefsee

Keine weiteren Tests wegen bedrohlichem Wellengang
25. bis 30. April 2013
Ostseefahrt mit
dem Forschungsschiff Elisabeth Mann Borgese
Zielgebiet: Oderbucht
Bei einem Aussetz- oder Bergemanöver wird die
Aufnahmevorrichtung für das AUV (Bergekäfig) mit einem speziell
entwickelten Hebezeug durch den A-Kran bewegt. Auf dieser Fahrt
sollte erstmalig dieses Manöver ausgeführt werden. Allerdings
stellte es sich heraus, dass die Kranauslegerweite auf dem Forschungsschiff
Elisabeth Mann Borgese nicht ausreicht. Daher wurden die geplanten Versuche abgebrochen.

Forschungsschiff Elisabeth Mann Borgese
7. bis 11. März 2013
Ostseefahrt mit
dem Forschungsschiff Alkor
Zielgebiet: Darßer Schwelle,
Arkonabecken und Oderbucht
Bei der Bergung des AUVs mit dem Bergekäfig müssen
alle Teilfunktionen und Komponenten problemlos ineinander greifen.
Somit nutzte die Tiefseecrew des FMT jede Möglichkeit, das
Einholen und Fixieren des AUVs unter realen Bedingungen auf See zu
erproben. Für diese Versuche stand zu diesem Zeitpunkt allerdings
nur der Ersatzkörper der PreToS zur Verfügung. Dieser Einsatz ergab jedoch
wichtige Erkenntnisse über den Bewegungsablauf und führte zu
notwendigen Modifikationen, die sofort vorgenommen wurden.
Erprobung des Aussetz- und Einholmanövers
mit dem Käfig und dem PreToS - Ersatzkörper
21. bis 25. Februar
2013
Ostseefahrt mit
dem Forschungsschiff Alkor
Zielgebiet: Darßer Schwelle,
Arkonabecken und Oderbucht
Das sichere Andocken des AUVs wird durch das
Schließen eines Bolzens angezeigt. Der Bolzen lässt sich über
einen Bowdenzug betätigen, welcher jedoch aufgrund der
Feuchtigkeit und Kälte einfror. Das Team ließ sich trotz
eingefrorener Bowdenzüge nicht davon abgehalten, weitere
Verbesserungen am Bergekäfig auf der vereisten Ostsee zu
erproben.
Reparaturen am Bergekäfig bei eisiger Kälte
Der Bergekäfig mit dem PreToS - Ersatzkörper ist bereit für die Wasserung
14. bis 17. Januar 2013
Ostseefahrt mit
dem Forschungsschiff Alkor
Zielgebiet: Darßer Schwelle,
Arkonabecken und Oderbucht
Bei klirrender Kälte wurde der Bergekäfig im
Zusammenspiel mit dem AUV - Ersatzkörper das erste Mal auf der Ostsee
eingesetzt. Dabei wurde deutlich, dass sich damit sichere Aus-
sowie Einkoppelmanöver durchführen lassen.

Letzte Vorbereitungen für das Aussetzen
des PreToS - Ersatzkörpers inklusive Käfig

Ein- und Auskoppeln des PreToS - Ersatzkörpers am Käfig
Der PreToS - Ersatzkörper wurde erfolgreich fixiert,
Seile fangen die Pendelbewegung beim Hieven an Bord ab
10. bis 11. Januar 2013
Schlepprinne der
Technischen Universität Berlin
Nach den ersten Versuchen mit dem Bergekäfig in
der Schlepprinne waren bauliche Änderungen erforderlich, um das
Einkoppeln in den Bergekäfig noch sicherer und leichter
durchzuführen. Die Verbesserungen wurden in der Schlepprinne
anhand diverser Koppelmanöver überprüft.

Erprobung des Ein- und Auskoppelvorgangs am Käfig.
Es zeigt sich, dass bauliche Optimierungen erforderlich sind
17. bis 21. Dezember
2012
Schlepprinne der
Technischen Universität Berlin
Wegen
der Beschädigung der PreToS stand das AUV für die weitere Erprobung der
Bergeeinrichtung nicht zur Verfügung. Die Mitarbeiter des FMT bauten
daher einen Ersatzkörper auf, welcher baugleich zur vorderen Hälfte der
PreToS ist und somit für das Einparken in den Bergekäfig nutzbar war.
Die Versuche fanden in der historischen Schlepprinne der TU Berlin
statt, wobei durch periodisches Tauchen des Ersatzkörpers auch die
erschwerten Bedingungen auf See nachvollzogen wurden. Im
Bergekäfig ist eine Seilwinde integriert, die das AUV in den Käfig
hineinzieht. Anschließend rastet ein Bolzen an der oberen Öse des AUVs
ein. Danach lässt sich der gesamte Käfig mit dem AUV aus dem Wasser
hieven.
 
Einholen und Koppeln des PreToS - Ersatzkörpers am Käfig

Ausrichten des Käfigs für erste Einkoppelversuche
mit dem PreToS - Ersatzkörper
10. bis 18. September
2012
Ostseefahrt mit
dem Forschungsschiff Elisabeth Mann Borgese
Zielgebiet: Darßer Schwelle und
Arkonabecken
Die
Reise diente der weiteren Erprobung des AUVs unter Einsatzbedingungen.
Dabei sollte auch erstmals die Funktion des Bergekäfigs beim Einfangen
des AUVs getestet werden. Nach mehreren erfolgreichen Fahrten riss beim
Aussetzen das Stahlseil des Schiffskrans und das AUV stürzte auf das
Deck des Forschungsschiffs. Es wurde dabei schwer beschädigt. Bei den
nachfolgenden Forschungsfahrten wurden daher nur Einbaukomponenten
getestet. Als PreToS - Ersatz diente ein Hilfsaufbau, mit dem sich
Andockmanöver durchführen ließen.
Bergekäfig und PreToS auf der Helling an Deck des Forschungsschiffs

PreToS auf der Helling kurz vor dem Aussetzen

Aussetzen der PreToS mit dem Seitenkran

PreToS kurz vor dem Abtauchen

Einholen mit dem Seitenkran,
Hilfsseile dämpfen die Pendelbewegungen
Aussetzen des Bergekäfigs mit dem A-Kran

Aussetzen der PreToS mit dem A-Kran

Oberflächenfahrt, Test der Steuerung, Erprobung der Kommunikation

PreToS nach dem Sturz auf das Deck,
Besichtigung der Schäden
10. bis 16. August 2012
Ostseefahrt mit
dem Forschungsschiff Elisabeth Mann Borgese
Zielgebiet: Darßer Schwelle und
Arkonabecken
Diese Ostseefahrt diente dazu, den Bergekäfig für
das AUV PreTos sowie die Inertiale Navigationseinheit des AUVs
erstmals auf See zu erproben. Da die hochfrequenten GPS - Signale
nicht in das Wasser eindringen, nutzt man bei der Unterwasserfahrt
die so genannte Inertiale Navigation.

Der Käfig ist im Wasser und richtet sich
bei leichter Fahrt des Schiffs wunschgemäß aus

Aufnahme des Käfigs, Rücktransport auf das Deck
29. April bis 14. Mai
2012
Atlantikfahrt mit
dem Forschungsschiff Poseidon
Zielgebiet: 32° Nord, 22° West,
westlich von der nordafrikanischen Küste
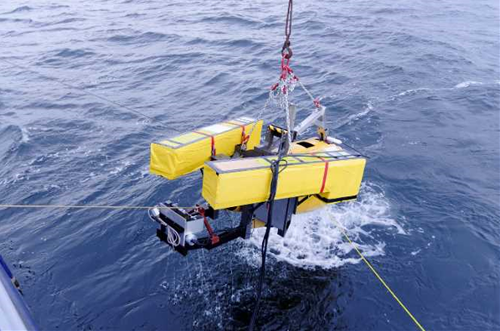
Im Verlauf einer zweiten Atlantikfahrt wurden
weitere am FMT entwickelte Einbaukomponenten des AUVs einem
Härtetest unterzogen, indem sie mit dem bereits bewährten
Geräteträger in die Tiefsee versenkt wurden. Dort erfüllten das
Auftriebstrimmsystem, ein druckneutraler PC und eine druckneutrale
Kamera vorgegebene Aufgaben. Die Auswertung der Ergebnisse zeigte,
dass sich die Geräte für den druckneutralen Einsatz eignen.
Kleinere Mängel wurden in der Folge beseitigt.
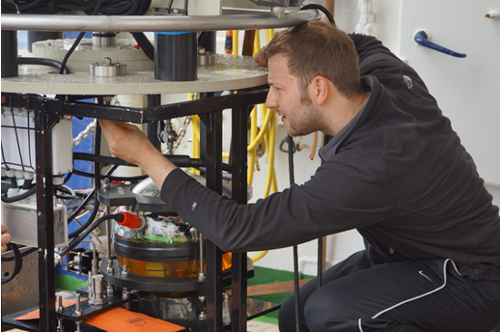
Tino Schmidt bereitet sein Auftriebs- und Trimmsystem
für den Tiefseeeinsatz vor
Aussetzen des Trimmsystems für Systemtests
März 2012
Tests im Umlauf- und
Kavitationstank K27 der Technischen Universität Berlin
Dr.-Ing. Eugen Olenew entwickelte während der Fertigung seiner
Dissertation ein neues Hochleistungsruder mit einem starren
Ruderprofil und einem Stauschwanz. Diese Form erzeugt bereits bei
kleinen Stellwinkeln hohe Ruderkräfte und ermöglicht ein sehr
kursstabiles Fahrverhalten des AUVs.
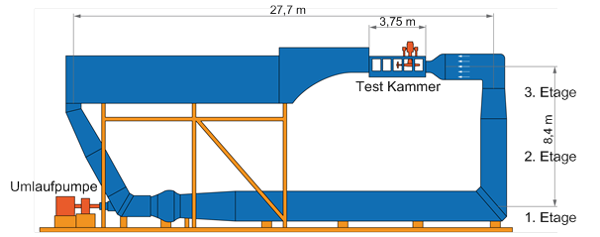
Schema des Umlauftanks für den Test des Hochleistungsruders
© Lars Koopmann, DMS / TUB
Da die Entwicklung des Ruderprofils anhand von 3D
FE-Modellrechnungen erfolgte, bestand großes Interesse, die
theoretischen berechneten Eigenschaften in Strömungsversuchen
experimentell zu untersuchen.
Dankenswerterweise konnten wir die Querkräfte und Drehmomente,
welche durch die Anstellung des Ruderblatts auftreten, im
Umlauftank K27 des Fachgebiets Maritimer Systeme in der Strömung
vermessen. Dabei war die Rudereinheit an einer
Sechs-Komponenten-Waage fest angebracht. Außer den Querkräften und
den Drehmomenten ließ sich damit auch der Strömungswiderstand
ermitteln, der für den Energieverbrauch entscheidend ist. Nach dem
Einbau des Rudersystems in das AUV zeigte das Boot bei Testfahrten
über und unter Wasser exzellente Manövriereigenschaften. Auch die Geradeausfahrten verliefen sehr ruhig
und demonstrierten die gute Kursstabilität der PreToS.
3. bis 6. März 2012
Ostseefahrt mit
dem Forschungsschiff Alkor
Zielgebiet: Darßer Schwelle und
Arkonabecken

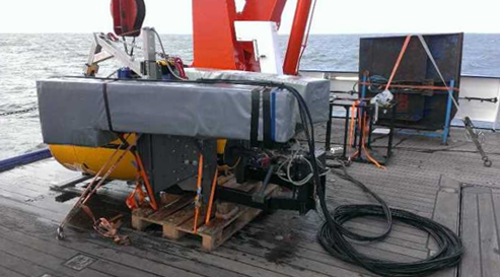
Bei dieser Fahrt auf der Ostsee galt es, das
Auftriebstrimmsystem der PreToS zu erproben. Das
Auftriebstrimmsystem ermöglicht eine Veränderung des
Gesamtauftriebs des AUVs, wodurch ein Auf- und Abtauchen ohne
Hauptantrieb möglich ist. Durch den Einsatz von zwei
Auftriebssystemen im AUV lassen sich Nickbewegungen des AUVs
realisieren.
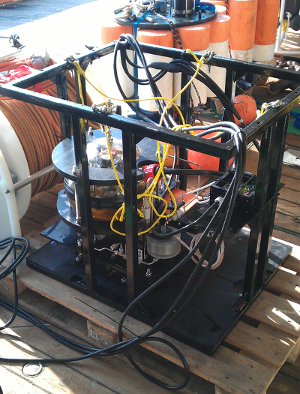
Aufbau des Auftriebstrimmsystems für den Ostseetest
Das Auftriebstrimmsystem besteht aus einem
druckfesten Glasbehälter, der mit Öl gefüllt ist und einem
flexiblen Balg. Aus dem Behälter wird das Öl in den Balg gepumpt,
wodurch der Druckkörper Auftrieb erzeugt. Über ein Ventil kann
das Öl wieder zurückfließen. Somit verändert sich das
verdrängte Gesamtvolumen bei gleichbleibender Masse und der
Gesamtauftrieb lässt sich variabel verändern.
12. bis 18. Dezember
2011
Ostseefahrt,
Forschungsschiff Elisabeth Mann Borgese
Zielgebiet: Darßer Schwelle und
Arkonabecken
Bei dieser Ostseefahrt erprobte unser
Projektpartner, die Firma EvoLogics, die von ihren Fachleuten
entwickelte Ultraschallkommunikationseinrichtung, welche später in
das AUV eingebaut wurde. Das Team des FMT testete das Altimeter des
AUVs. An der Darßer Schwelle hat die Ostsee eine Tiefe von
ungefähr 18 Metern. Im Arkonabecken beträgt die Tiefe bereits 48
Meter. Dies ließ sich mit dem Altimeter präzise vermessen.
23. bis 30. September
2011
Ostseefahrt mit
dem Forschungsschiff Elisabeth Mann Borgese
Zielgebiet: Darßer Schwelle und
Arkonabecken
Verzögerungen beim Aufbau der PreToS führten dazu,
dass die vorgesehenen Testfahrten von einer Plattform auf der
Ostsee nicht durchgeführt wurden. In der Zwischenzeit erfolgte die
Fertigstellung des neuen Forschungsschiffs Elisabeth Mann Borgese.
Damit ließ sich das AUV erstmals von einem Schiff ausbringen und
einholen. Auf und in der Ostsee absolvierte das AUV Oberflächen-
sowie Tauchfahrten. Die Handhabung auf einem Forschungsschiff war
eine völlig neue Erfahrung. Alle Komponenten mussten jederzeit
gesichert sein, weil sich das Schiff permanent bewegte. Dies
beeinflusste den Aussetz- und Einholvorgang. Nach mehrmaligen
Versuchen funktionierte auch dies perfekt und das AUV kam
wieder sicher nach Hause.

PreToS an Deck des Forschungsschiffs auf der Helling

Alles ist für die erste Testfahrt vorbereitet,
das U-Boot wurde getauft

Wendemanöver zeigen die sehr gute Beweglichkeit des U-Boots

Nach der ersten Fahrt in der Ostsee: die PreToS kehrt zurück

Zurück an Deck des Forschungsschiffs
So wie jedes neue Wasserfahrzeug wurde auch das
AUV getauft und erhielt eine Taufurkunde, wobei sich das
Projektteam auf das Akronym PreToS einigte, welches die ersten
Buchstaben des vollen Namens enthält: Pressure
Tolerant System.
Taufurkunde
9. September 2011
Tests im Rostocker
Hafen, Revier am Fischereihafen
Die Jungfernfahrt des AUVs fand im Hafenbecken von
Rostock statt. Dabei wurde es von den Bewohnern des Hafens, den
Schwänen, mißtrauisch beäugt. Alles funktionierte, und das AUV drehte
seine Runden an der Wasseroberfläche. Die Kommunikation zum AUV
wird über Funk und W-LAN hergestellt. Damit ist es möglich, das
Fahrverhalten des AUVs zu beeinflussen.

Aussetzen der PreToS im Rostocker Hafen

Wassern im Hafen zur Überprüfung der Trimmlage

Die Schwäne im Fischereihafen schwimmen mißtrauisch
um den Eindringling, bereit, ihr Revier zu verteidigen

Erste Schwimmversuche zeigen ein sehr gutes Fahrverhalten

Zur Sicherung schleppt die PreToS hier noch eine Boje
9. Mai 2011
Tests in der
Schlepprinne der Technischen Universität Berlin
Aufgrund des Mangels an verfügbarer Schiffszeit
beschloß das Projektteam, die ersten Fahrversuche des AUVs an
einer Außenstelle in der Ostsee durchzuführen. Da diese Plattform
nur über schwimmfähige Einrichtungen erreichbar ist, baute das
FMT-Team ein Transportfloß, mit dem die "Helling", die
Ablagevorrichtung des AUVs sowie auch das AUV selbst zur Plattform
transportiert werden sollten.

Untersuchung des Schwimmverhaltens
des Transportfloßes in der Schlepprinne

Simulation des Schleppvorgangs:
das Floß mit Helling wird vom Schleppkran gezogen

Das Floß mit Helling in der Schlepprinne,
Test der Tragfähigkeit
Die obigen Bilder zeigen, dass es sich dabei um
zwei Pontons mit Montageflächen handelte. Werden die Helling und
das AUV darauf befestigt, so zeigt sich, dass der
Massenschwerpunkt dieses Gebildes über der Wasseroberfläche liegt.
Dies und die Bewegung des Fahrzeugs bei verschiedenen
Schleppgeschwindigkeiten dienten als Test für die Stabilität des
Transportfahrzeugs bei der Fahrt auf der Ostsee.
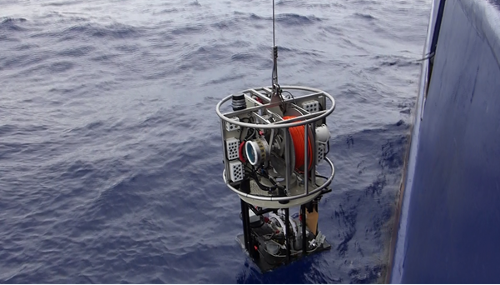
15. April bis 8. Mai
2011
Atlantikfahrt mit
dem Forschungsschiff Maria Sibylla Merian
Zielgebiet: 32° Nord, 22° West,
westlich von der nordafrikanischen Küste
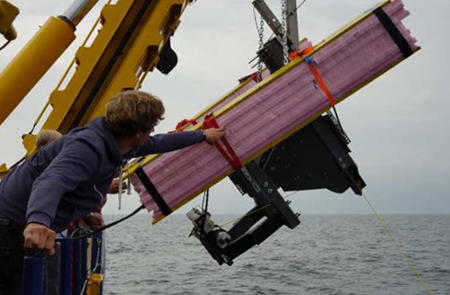
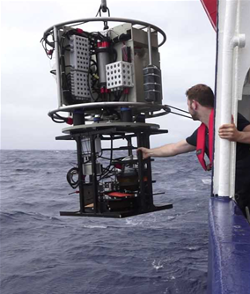
Da es sich bei dem AUV um ein druckneutrales
Fahrzeug handelt, ist der Innenraum geflutet, so dass alle
Bauteile des AUVs dem jeweiligen Umgebungsdruck ausgesetzt sind.
Im Verlauf dieser Atlantikfahrt wurden daher eine Reihe von
Einbaukomponenten des AUVs anhand eines Komponententrägers mit
einem Einleiterkabel in eine Tiefe von 5.000 Meter abgesetzt.
Außer der Druckbelastung von 500 bar sinkt die Umgebungstemperatur
bei dieser Tiefe auf vier Grad Celsius. Insgesamt handelte es sich daher für die
folgenden geprüften Komponenten um einen echten Härtetest:
Auftriebstrimmsystem, Releaser, druckneutrale Kamera,
druckneutraler PC, druckneutrale Scheinwerfer, Ruderstellermodul.

Tiefseetests verschiedener Komponenten des AUVs,
die auf einem Komponententräger befestigt sind

Forschungsschiff Maria Sibylla Merian während der Fahrt
Mai 2010
Tests in der
Schlepprinne der Technischen Universität Berlin
In der Versuchsanstalt für Wasserbau und
Schiffsbau (VWS) der Technischen Universität Berlin stehen lange
Wasserbecken zur Verfügung. Auf der längsten Strecke verfährt eine
Traverse, welche die Wasserfläche überspannt. Deren
Fahrgeschwindigkeit lässt sich präzise einstellen und ermöglichte
damit die Überprüfung des Doppler Velocity Logs (DVL), welches bei
verschiedenen Geschwindigkeiten der Traverse durch das Wasser
gezogen wurde. Die vom DVL ermittelten Geschwindigkeitswerte
entsprachen im Rahmen der Messgenauigkeit der Fahrgeschwindigkeit
der Traverse.

Test des Doppler Velocity Logs
Mai 2010
Einweihung unserer hauseigenen „Werft“ auf dem
Campus der Technischen Universität, in unmittelbarer Nähe zum
Stammsitz des Fachgebiets Mikrotechnik. Ein verfahrbarer
Deckenkran mit Hebezeug und komfortabler Bedienung erleichtert die
Bewegung und den Transport schwerer Teile. Die große Arbeitsfläche
ermöglicht in der Folgezeit die Aufstellung des eigenen Drucktanks, eines Wassertestbeckens
und diverser Bearbeitungsmaschinen.

Die noch fast leere Halle BA 008 bei der Einweihung
31. März 2010
Test im Tiefwassertank
Das
Doppler Velocity Log (DVL) konnte im Tiefwassertank getestet werden.
Ein DVL wird dazu verwendet, die momentane Geschwindigkeit relativ zum
umgebenden Wasser zu messen. Dabei werden Schallwellen in verschiedene
Richtungen abgegeben. Infolge von Inhomogenitäten im Wasser
(Verschmutzung, Luftblasen) werden die Schallwellen reflektiert. Steht
die Messeinrichtung im ruhenden Wasser, bleibt die Frequenz der
Schallwellen gleich. Je nach Geschwindigkeit des AUVs und Richtung der
Schallwellen ändert sich die Frequenz der absandten Schallwellen.
Anhand der Frequenzverschiebung kann das DVL die relative
Geschwindigkeit zum umgebenden Wasser oder zum Boden errechnen.
März 2010
Test im Tiefwassertank
Im so genannten „Tiefwassertank“ des Instituts für
Land- und Seeverkehr der Technischen Universität Berlin wurden ein für das Forschungsprojekts beschafftes
Altimeter, ein Drucksensor sowie das Doppler Velocity Log für das zukünftige AUV vermessen.

Funktionstests von Einbaukomponenten
des AUVs im Tiefwassertank der TU Berlin
Der „Tiefwassertank“ ist zwar nur 4,5 Meter tief,
eignet sich jedoch sehr gut für einen ersten Funktionstest der
beiden Sensoren. Das Altimeter dient zur Abstandsmessung von
Objekten. Es sendet Schallwellen aus und misst die Laufzeit des
nach dem Aussenden von einem Objekt reflektierten Schalls. Im AUV
wird das Altimeter zur Bestimmung des Abstands vom Meeresboden
genutzt. Mit dem Drucksensor lässt sich der hydrostatische Druck
messen, der pro zehn Meter Wassersäule um etwa ein bar
steigt. Daher kann man mit dem Drucksensor die Tauchtiefe des AUVs
bestimmen. Kennt man den Salzgehalt des Wassers, lässt sich die
Tauchtiefe mit wenigen Metern Genauigkeit angeben.
Herbst 2009
Das Forschungsteam „Druckneutrale Systeme für die
Tiefsee“ freut sich ganz außerordentlich über die Bewilligung des
Projekts durch das Bundesministerium für Wirtschaft und
Technologie. Endlich kann es losgehen!
Die Tiefsee-Crew zu Beginn des Projekts
|
|
|