Positioniereinheit für eine Stereoendoskopkamera
|
Neben 3D-Endoskopen, bei denen sich zwei Kamerachips an der Endoskopspitze befinden, werden Stereoendoskope auch mit zwei Optikkanälen in Kombination mit einer proximalen Stereokamera aufgebaut. Gegenüber dem einfachen und kompakten Aufbau von Chip-on-the-Tip-Systemen bieten externe Stereokameras mehr Bauraum, wodurch sich große lichtempfindliche Bildsensoren in HD-Auflösung einsetzen lassen, die eine bessere Bildqualität erzeugen als die Mini-Bildaufnehmer der Chip-on-the-Tip-Technik.
Im Verlauf eines Forschungsprojekts wurde ein
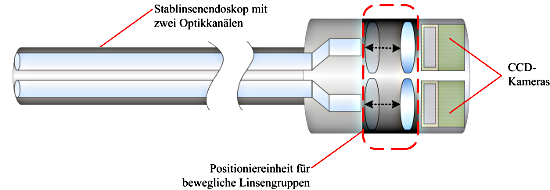
neuartiges 3D-Endoskop-System, bestehend aus einem Stablinsenendoskop
mit zwei Optikkanälen und einer Stereokamera, aufgebaut. Die
Stereokamera beinhaltet zwei Objektive mit beweglichen optischen
Linsengruppen zur Scharfstellung der Stereopaarbilder und zwei
CCD-Kameras. Eine neue Stelleinrichtung zur Bewegung der Linsengruppen
erlaubt die gleichlaufende Positionierung der beiden Fokuslinsengruppen
in beiden Optikkanälen.
Stereoendoskopie-System mit Positioniereinheit für bewegliche Linsengruppen
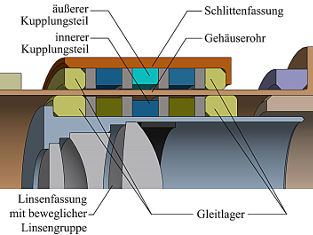
Mit dem Ziel der Autoklavierbarkeit des Endoskopiesystems müssen die beiden Optikkanäle dampfdicht verschlossen werden. Beide bewegliche Linsengruppen, die Bildaufnehmer und die starren Linsengruppen befinden sich deshalb in zwei voneinander getrennten Hülsen, die hermetisch gekapselt sind. Unabhängig von der Dampfdichtigkeit wird eine hohe Positioniergenauigkeit bei der Bewegung der Fokussiereinheiten gefordert. Der Versatz zwischen den beiden beweglichen Linsengruppen darf in allen Positionen nur wenige Mikrometer betragen, damit die Teilbilder des Stereobildpaars identische Bildschärfen aufweisen.
Kräfte lassen sich anhand von magnetischen Kupplungen in dampfdichte Gehäuse übertragen, so dass die Bewegungen außerhalb der hermetischen Kapselung auch im Innern des Gehäuses ablaufen, um beispielsweise optische Elemente zu bewegen.
Das Konzept für die synchrone Linsenbewegung in einer Stereoendoskopkamera sieht die Verwendung von zwei magnetischen Kupplungen vor, die durch einen spindelgetriebenen Schlitten bewegt werden.
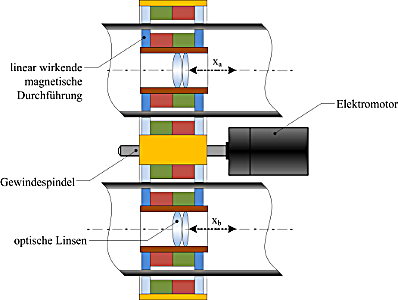
Konzept der Positioniereinheit: Spindeltrieb mit linearer Magnetkupplung
Eine Gewindespindel überführt die Rotationsbewegung eines Elektromotors in eine Linearbewegung des Schlittens, in dem die äußeren Magnetgruppen montiert sind. Bei einer Längsbewegung des Schlittens werden die Magnetgruppen im Inneren der beiden optischen Kanäle der Stereokamera durch Reluktanzkräfte mitbewegt, so dass die axiale Bewegung des Schlittens zu einer identischen Linearbewegung der Linsengruppen in den beiden Optikkanälen führt.
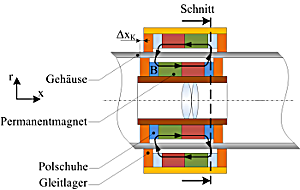
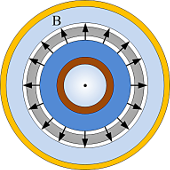
Schematische Ansicht der linear wirkenden magnetischen Kupplung,
Längsschnitt (links) und Querschnitt (rechts)
Im Grundzustand befinden sich die Polschuhe der Kupplungsteile genau gegenüber. Die magnetischen Feldlinien verlaufen radial durch den Luftspalt und die Gehäusewand. Aufgrund der Reluktanzwirkung entstehen radiale Grenzflächenkräfte Frad. Da der magnetische Kreis aus ideal konzentrischen rotationssymmetrischen Komponenten aufgebaut ist, beträgt die resultierende Reluktanzkraft im Grundzustand Null.
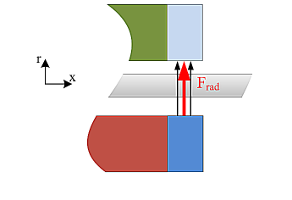
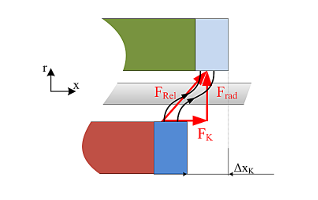
Erläuterung zur longitudinalen Kraftwirkung der Reluktanzkraft,
Gleichgewicht (links) und axialer Versatz (rechts)
Wird der äußere Schlitten relativ zum inneren System um ΔxK verschoben, stehen sich die Polschuhe nicht mehr gegenüber. Durch die Verschiebung erzeugt das magnetische Feld auch eine axiale Komponente, so dass der Kraftvektor der Grenzflächenkraft FRel nun auch longitudinal gerichtet ist. Die Reluktanzkraft lässt sich aufteilen in eine radial Frad und eine axial gerichtete Komponente FK. Während sich die radial wirkenden Kräfte Frad aufgrund der Rotationssymmetrie aufheben, tritt die axiale Kraftkomponente FK als longitudinal wirkende Kopplungskraft zwischen dem inneren und dem äußeren Kupplungsteil auf.
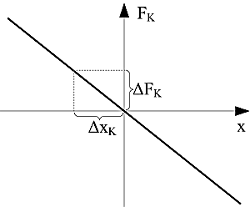
Schematischer Zusammenhang zwischen der Kopplungksraft FK und dem Versatz xK
Der Quotient aus der resultierenden Longitudinalkraft ΔFK und dem Versatz ΔxK wird als Kopplungsfestigkeit cK bezeichnet. Je größer die resultierende axiale Kraftwirkung bei einer vorgegeben Auslenkung ist, umso besser ist die magnetische Kopplung.

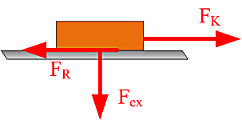
Aufgrund begrenzter Fertigungsgenauigkeit existieren immer Bauteiltoleranzen. Diese Toleranzen führen zu Asymmetrien im magnetischen System. Im vorliegenden Fall ergeben sich Toleranzen bei der Konzentrizität der Kupplungsteile, so dass einseitig radial wirkende Reluktanzkräfte Fex auftreten, die normal auf die Gleitlagerringe des Systems wirken und eine asymmetrische Anpressung an die Gehäusewand verursachen. Über den Reibungskoeffizienten µR lässt sich die Reibkraft FR bestimmen, die einer axial gerichteten Reluktanzkraft FK durch die magnetische Kopplung entgegenwirkt.
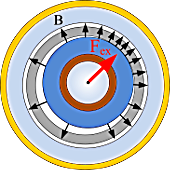
Querschnitt der magnetischen Kupplung bei exzentrischer Anordnung (links),
Kraftvektoren am Gleitlager (rechts)
Über den Reibungskoeffizienten µR lässt sich die Reibkraft ermitteln:

Sie wirkt der Bewegung in x-Richtung entgegen. Im stationären Zustand existiert zwischen der Kopplungskraft FK und der Reibkraft FR ein Kräftegleichgewicht.

Über die Kopplungsfestigkeit der magnetischen Kupplung cK lässt sich der Versatz ΔxK zwischen äußerem und innerem Kupplungsteil aufgrund der Reibkraft FR berechnen.

Der Versatz ΔxK entspricht damit der Genauigkeit, die sich bei der Einstellung der Position über die magnetische Kopplung erzielen lässt. Es zeigt sich, dass eine möglichst große Steifigkeit nicht als alleiniges Gütekriterium herangezogen werden kann. Vielmehr muss die Fertigungstoleranz bekannt sein, um die exzentrischen Reluktanzkräfte zu berechnen. Im nächsten Schritt lässt sich dann über den Reibungskoeffizienten die theoretische Positioniergenauigkeit ermitteln.
Über die Parameter des optischen Linsensystems, insbesondere den axialen Verfahrweg der Linsengruppen und die geometrischen Maße, ist der Bauraum für die magnetische Kupplung vorgegeben. Die Richtwerte für die Volumenmaße der Magnetkupplung wurden als Vorgaben für die Optimierung mit Hilfe von Finite-Elemente-Modellrechnungen verwendet.
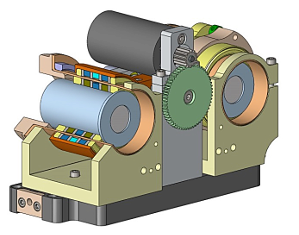
Im Anschluss an die magnetische Auslegung wurde die Positioniereinrichtung gefertigt. Auf der Grundplatte befinden sich zwei Aufnahmen für die rohrförmigen optischen Linsensysteme. Zentral dazwischen ist ein Gleichstrommotor mit Stirnradgetriebe, Linearspindel und Schlitten für die motorische Positionseinstellung aufgesetzt. Durch die Rotation des Motors lässt sich somit eine Longitudinalbewegung der äußeren Kupplungsteile realisieren.

Positioniereinheit zur synchronen Verstellung
von Linsengruppen für eine Stereoendoskopkamera
Für die Lagerbauteile der Kupplungseinheit ergeben sich die größten Anforderungen an die Fertigungsgenauigkeit. Sowohl die äußeren als auch die inneren Lagerringe bestehen aus reibungsarmem Kunststoff. Die Gehäuserohre müssen unter Einhaltung höchster Toleranzen präzise gefertigt werden. Die rohrförmigen Gehäuse wurden deshalb nach dem Feindrehen poliert, um hohe Oberflächengüten zu erzielen.