Manövriereinrichtung für das AUV PreToS
|
Ungefähr 62 Prozent der Erdoberfläche sind von Wasser mit mindestens 1.000 Meter Tiefe bedeckt und gehören damit zur Tiefsee. Dieser größte Lebensraum unseres Planeten ist immer noch weitgehend unerforscht. Die zunehmende Energieverknappung zwingt jedoch die Menschen, diese wasserbedeckten Areale zu explorieren, da dort riesige Mengen unterschiedlichster Rohstoffe mit hohem Energiegehalt lagern. Die harschen Bedingungen in der Tiefsee stellen jedoch große Herausforderungen an Forschungsgeräte, die zur Erkundung der Tiefsee genutzt werden.
Unbemannte
autonome Unterwasserfahrzeuge (AUV) dringen in Gebiete vor, die
für Taucher unerreichbar sind, um dort Inspektions- und
Überwachungsaufgaben zu übernehmen. Eine Besonderheit ist die
kabelunabhängige und autonome Navigations- und
Manövrierweise, die es erlaubt, große Areale während
einer Tauchmission zu untersuchen. Um diese weiten Strecken bei
begrenzter Energieversorgung bewältigen zu können, haben
autonome Unterwasserfahrzeuge meist eine strömungsgünstige
Form.

Das pinguinähnliche AUV PreToS auf dem Forschungsschiff Elisabeth Mann Borgese
Für das während des Forschungsprojekts „Druckneutrale Systeme für die Tiefsee“ entwickelte AUV PreToS wurde aus diesem Grund eine von Pinguinen abgeleitete bionische Rumpfform gewählt, die unter rotationssymmetrischen Strömungsformen die geringsten Widerstandswerte aufweist. Ein Nachteil dieser Rumpfform ist die Neigung zu Kursinstabilitäten, die ohne geeignete Leitwerke bereits bei minimalen Kursstörungen ein Ausbrechen des Fahrzeugs verursacht. Daher wurde eine Hochleistungsruderanlage entwickelt, die aufgrund ihrer sehr kompakten Abmessungen und einem geringen Gewicht dem Unterwasserfahrzeug sowohl bei Tauchmissionen als auch bei Oberflächenfahrten eine hervorragende Manövrierfähigkeit verleiht.
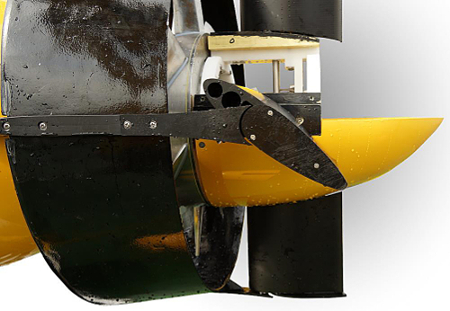
Kompakte Hochleistungsruderanlage des AUVs
Diese Eigenschaften ließen sich durch
eine sorgfältige hydrodynamische Auslegung und die Verwendung
einer speziellen als „Fishtail“ bezeichneten Form des
Ruderprofils erzielen. Seeerprobungen zeigten, dass sich mit diesem
Manövriersystem sowohl Horizontalkurse sicher fahren als auch
konstante Tauchtiefen halten lassen.
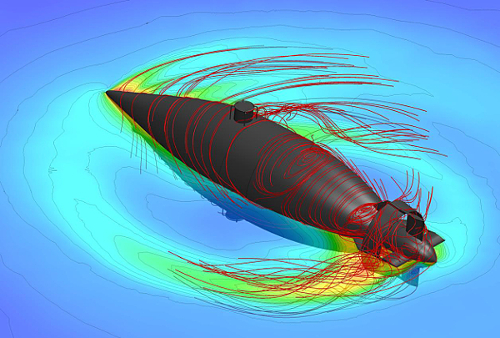
Numerisch berechnetes Wendemanöver mithilfe zweier Querstrahlsteuersysteme
Beim Kurshalten wird die Ruderanlage durch eine neu entwickelte Propellerdüse unterstützt, die einen großen Durchmesser aufweist, so dass die Ruderflächen nicht über die Düsenkontur herausragen, was mit der Propellerummantelung die Robustheit des Gesamtfahrzeugs unterstützt.
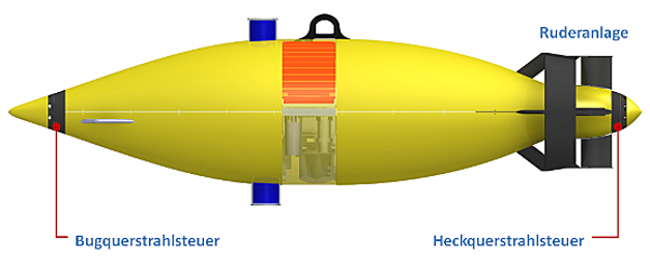
Das AUV PreToS mit den integrierten Manövriereinrichtungen
Bei komplexen Missionen autonomer
Unterwasserfahrzeuge wird häufig die ortsfeste Positionierung des
Fahrzeugs gefordert. Dies gelingt bei Hauptpropellerstillstand nur,
wenn als Querstrahlsteuer bezeichnete Manövriereinrichtungen
vorhanden sind. Folglich wurden für die PreToS neuartige
Querstrahlsteuer entwickelt, welche sich im Heck und im Bug des
Fahrzeugs befinden und aufgrund ihrer schwenkbaren Wirkrichtung die
vollständige Quermanövrierfähigkeit sowohl in der
Vertikal- als auch in der Horizontalebene erlauben.
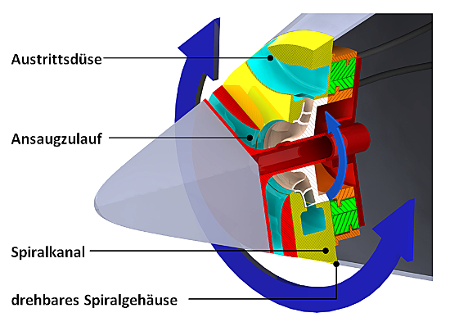
Funktionsprinzip und schematischer Aufbau des neuartigen Querstrahlsteuersystems
Dieses Querstrahlsystem zeichnet sich im Vergleich zu üblichen Querstrahleinrichtungen durch seinen geringen Bauraum sowie seine hohe Leistungsfähigkeit und Energieeffizienz aus. Eine weitere Besonderheit bildet die verhältnismäßig kleine Durchbruchfläche der Fahrzeugrumpfhaut, die auf viele kleine Einzelöffnungen verteilt ist, so dass nur ein geringer hydrodynamischer Fahrwiderstand entsteht. Letzteres ist vorteilhaft für den geringen Strömungswiderstand des Fahrzeugs bei einer Langstreckenfahrt.


Mit den vorgestellten
Manövriereinrichtungen wurde ein einzigartiges Unterwasserfahrzeug
aufgebaut, welches nicht nur eine für Langstreckeneinsätze
optimale Strömungsform aufweist, sondern auch die
vollständige Quermanövrierfähigkeit bei Stillstand des
Hauptantriebs erlaubt. Alle entwickelten Komponenten erfüllen
dabei die Anforderungen eines druckneutralen, auftriebsoptimierten
Aufbaus für eine Auslegungstauchtiefe bis zu 6.000 Meter.
Projektpartner im Forschungsverbund "Druckneutrale Systeme für die Tiefsee"
ENITECH Energietechnik Elektronik GmbH, Bentwisch / Rostock
EvoLogics GmbH, Berlin
Fachgebiet Mikrotechnik der Technischen Universität Berlin
Leibniz-Institut für Ostseeforschung Warnemünde
Alle oben genannten Ergebnisse sind in meiner Dissertation ausführlich beschrieben:

PreToS bei einer Oberflächenfahrt
Herrn Prof. Dr. Heinz Lehr danke ich für die Möglichkeit, in diesem herausragenden Forschungsprojekt mitzuarbeiten und für seine wissenschaftliche Betreuung. Bei meinen Teamkollegen Romon Chakrabarti, Johannes Gelze, David Mischnick, Oliver Preradović, Tino Schmidt und allen Mitarbeitern des FMT sowie den externen Projektpartnern möchte ich mich für die tatkräftige Unterstützung herzlich bedanken.
Dem Bundesministerium für Wirtschaft und
Technologie / Projektträger Jülich gilt der Dank für die
finanzielle Förderung dieses Projekts.
Förderkatalog: foerderportal.bund.de Förderkennzeichen: 03SX276A
 |
 |