Miniaturisierte Linearaktoren
|
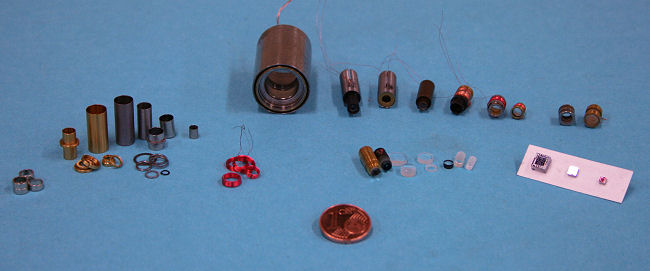
Im Rahmen verschiedener Entwicklungsprojekte wurde eine Vielzahl von miniaturisierten Linearaktoren für die Anwendung in der Medizintechnik aufgebaut und erprobt.
--
--
Die steigenden Anforderungen an medizintechnische Geräte erfordern maßgeschneiderte und intelligente Lösungen. Dies gilt insbesondere für die minimal-invasive Chirurgie, bei der Endoskope das Basisinstrument jedes Eingriffs darstellen. Neben einer hoch auflösenden Bild-wiedergabe lassen sich bei modernen Endoskopen die Blickrichtung und die Vergrößerung des Bilds (Zoomfaktor) variieren, wobei die erforderliche Nachfokussierung manuell erfolgt.
--

--
Bis
heute werden alle
Stellvarianten ausschließlich von Hand betätigt.
Allerdings
zielen neueste Entwicklungen dahin, Funktionsgruppen wie Linsen,
Prismen oder auch den Bildaufnahmechip direkt in der Endoskopspitze mit
elektromagnetischen Miniaturantrieben zu bewegen. Am Fachgebiet
Mikrotechnik der TU Berlin wurden hierfür verschiedene
elektromagnetische Antriebskonzepte entwickelt und in Endoskopen
eingesetzt.
Anforderungen nach robusten, ausfallsicheren und einfach zu bedienenden
Instrumenten leiten sich aus der Verwendung der Systeme im klinischen
Alltag her.

--
Für
die
unterschiedlichen Anwendungsbereiche wurden kontinuierlich verfahrende
Antriebe ebenso wie Zwei- und Mehrschrittantriebe entwickelt und
erfolgreich als Patente angemeldet
Der Schwerpunkt der Entwicklungen betraf neben dem Aufbau und einer
sicheren Funktion vor allem die erheblich vereinfachte Fertigung und
Montage der Aktoren.
Alle Aktoren zeichnen sich durch eine geringe Einzelteilzahl, minimales Prellverhalten und eine hohe Wiederholgenauigkeit aus.
--
Typische Parameter der Aktoren:
• Außendurchmesser: 3 - 12 mm
• Innendurchmesser: 0,7 - 8 mm
• Leistung: 0,3 - 1,5 W
• Schaltzeiten zwischen einzelnen Positionen:
20 µs
• Stellkräfte: 0,1 - 5 N
--
Wesentliche Bestandteile der Entwicklungen:
• optimale Abstimmung optischer
Funktionen mit der Aktorik
• Anpassung der Aktoren an den
eingeschränkten Bauraum
• Optimierung des Bewegungsverhaltens
• motorischer Betrieb optischer
Komponenten
• veränderliche Blickrichtung
des Endoskops
• Aufbau einer geeigneten Aktoransteuerung als Hard-/ Softwarelösung