Navigation von autonomen
Tiefseefahrzeugen
|
Das Meer ist ein wichtiger Lebens- und Wirtschaftsraum für die Menschen. Durch das Wachstum der Weltbevölkerung und den hohen Bedarf an Rohstoffen, Energie und Lebensmitteln werden die Meere immer stärker erschlossen und genutzt.
Dabei entstehen zahlreiche Einrichtungen und Strukturen unter der Wasseroberfläche. Beispielsweise handelt es sich um Bohreinrichtungen für die Förderung von Öl und Gas oder um Offshore-Windkraftanlagen. Ein Großteil der Arbeiten zum Aufbau und Betreiben dieser Unterwasserbauwerke werden vom Schiff aus mit kabelgebundenen Tauchrobotern oder von Tauchern durchgeführt. Die hohen Kosten für den Aufbau, die Wartung und die Inspektion dieser Einrichtungen werden maßgeblich durch die Bereitstellung eines Schiffs verursacht.
Besonders für unkomplizierte und zeitaufwändige Aufgaben, wie die Inspektion und das Monitoring von Unterwasserbauwerken und Meeresregionen, bietet sich der Einsatz von autonomen Fahrzeugen an, da diese während ihrer Missionen auf kein Schiff angewiesen sind.
Autonome Unterwasserfahrzeuge
existieren
bereits, sie sind jedoch vor allem darauf ausgelegt, unbekannte Gebiete
zu erforschen oder zu kartographieren. Die Anschaffung solcher
Fahrzeuge ist mit einer großen Investition verbunden, da
für
die Erkundung von neuem Territorium eine spezielle, technische
Ausstattung erforderlich ist. Dies betrifft besonders ihre
Navigationssysteme, da die Positionsbestimmung der Fahrzeuge auch in
bisher nicht erforschten Regionen ohne die Kenntnis der absoluten
Position gelingen
muss.

Druckneutrales autonomes Unterwasserfahrzeug "PreToS" im Atlantik
Wenn keine absolute Bestimmung der Position durch Satelliten im Weltraum oder unter Wasser durch akustische Signale möglich ist, werden häufig Inertialnavigationssysteme eingesetzt. Inertialnavigationssysteme ermitteln aus Messungen der Beschleunigung und der Drehrate des Fahrzeugs die Position. Werden weitere Messgrößen, wie die Geschwindigkeit oder der hydrostatische Druck bei der Bestimmung der Position berücksichtigt, wird von einem integrierten Navigationssystem gesprochen.
Somit gelingt durch den Einsatz eines Inertialnavigationssystems die Bestimmung der Position, ohne auf eine äußere Infrastruktur angewiesen zu sein. Untrennbar mit diesem Vorteil ist jedoch der Nachteil verknüpft, dass der Positionsfehler mit der Zeit anwächst. Damit der Fehler nicht zu schnell anwächst, sind hochgenaue Sensoren notwendig, welche die hohen Kosten eines solchen Systems verursachen.
Da sich in Zukunft autonome Unterwasserfahrzeuge vielfach mit der Überprüfung von Aufbauten und Installationen in einem bekannten Gebiet beschäftigen werden, ist in diesem Bereich ein akustisches System zur Positionsbestimmung sinnvoll. Daher kann für diese Aufgaben auf ein hochgenaues und kostspieliges Inertialnavigationssystem verzichtet werden.
Fällt jedoch die akustische Navigation aus, muss für die Kurzstreckennavigation ausreichend Redundanz vorliegen, so dass sich die Ergänzung der akustischen Positionsbestimmung um ein preiswertes, integriertes Navigationssystem anbietet. Durch die Kombination beider Systeme lässt sich insgesamt die Genauigkeit der Positionsbestimmung erhöhen und bei einem Ausfall des akustischen Systems ein sicherer Notaufstieg gewährleisten.
Für Luft- und Landfahrzeuge existieren vergleichbare Systeme. Diese basieren auf einer Kombination aus der Satellitennavigation, dem Monitoring des Bewegungsverhaltens des Fahrzeugs und der Inertialnavigation. Dadurch ist es möglich, auch mit preiswerten Inertialnavigationssystemen eine hohe Genauigkeit bei der Positionsangabe zu erzielen. Die genaue Bestimmung der Position funktioniert für kurze Zeitabschnitte auch in Gebieten, in denen kein Satellitenempfang möglich ist.
Unter Wasser übernimmt bei dem Unterwasserfahrzeug PreToS (siehe obige Abbildung) die akustische Positionsbestimmung die Rolle der Satellitennavigation. Sie unterscheidet sich jedoch besonders in der Reichweite von der Satellitennavigation. Akustische Signale zur Positionsbestimmung reichen nur einige Kilometer weit.
Im Rahmen des Forschungsprojekts
„Druckneutrale Systeme für die Tiefsee“,
das vom
Bundesministerium für Wirtschaft und Technologie
gefördert
und vom Fachgebiet Mikrotechnik der TU Berlin, der EvoLogics GmbH aus
Berlin, dem Leibniz-Institut für Ostseeforschung
Warnemünde
und der ENITECH GmbH aus Rostock bearbeitet wurde, entstand ein
integriertes Navigationssystem, das für den Einsatz in einem
tiefseefähigen autonomen Unterwasserfahrzeug ausgelegt ist.
Druckneutral bedeutet, dass eingebaute Komponenten nicht durch einen
steifen Metallkörper, sondern lediglich von einem elastischen
Verguss geschützt werden.
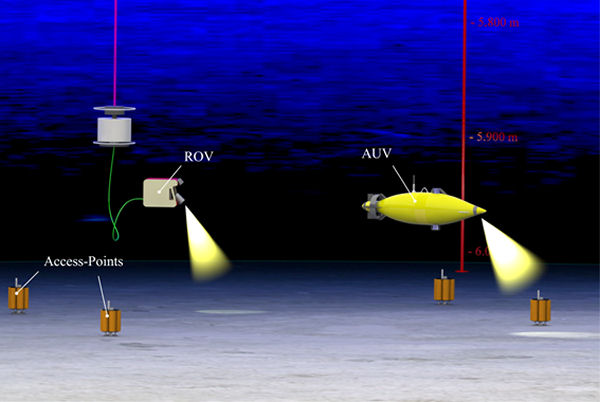
„Druckneutrale
Systeme für die Tiefsee“: Autonomes
Unterwasserfahrzeug (AUV)
und kabelgebundener Roboter (ROV) im akustischen Netzwerk
(Access-Points)
Der Schwerpunkt der
Entwicklungsarbeit lag auf einem System, das speziell auf die Einsatz-
und Umgebungsbedingungen angepasst ist. Berücksichtigt wurden
dabei die Dynamik des Fahrzeugs, die Genauigkeit und
Positions-Update-Rate des akustischen Systems, der Umgebungsdruck von
600 bar und das korrosive Meerwasser. Weiterhin wurden
zusätzliche
Sensoren des autonomen Fahrzeugs, nämlich ein
Geschwindigkeitsmessgerät und ein Drucksensor zur Bestimmung
der
Tiefe ausgewertet, um die Position des Fahrzeugs zu bestimmen.
Bei dem entwickelten Navigationssystem handelt es sich um eine Sensoreinheit mit Beschleunigungs- und Drehraten- sowie Magnetfeldsensoren und einem GPS-Empfänger, die im Zusammenspiel mit einem druckneutralen Navigationsrechner ein Inertialnavigationssystem bildet.
Durch die Aufteilung der Navigationseinrichtung in zwei Teilsysteme lässt sich der Navigationsrechner druckneutral aufbauen und die Sensoreieinheit mit einem Druckgehäuse ausführen.
Für eine kostengünstige und kompakte Bauweise der inertialen Messeinheit bietet sich die Verwendung von Mikrosensoren an. Die Genauigkeit solcher Mikrosensoren wurde in den letzten Jahren stark verbessert, so dass insgesamt eine ausreichende Genauigkeit der Messeinheit erreicht wird. Bei der Entwicklung der Messeinheit wurde ihr Einsatz in einem tiefseefähigen, autonomen Unterwasserfahrzeug berücksichtigt. Ein Druckzylinder aus hochfestem Aluminium schützt die Messeinheit vor dem Umgebungsdruck bis 600 bar.
Die Sensoreinheit wurde im
Hinblick auf eine
hohe Genauigkeit, kleinen Abmessungen und geringen Kosten entworfen.
Die Größe und die Geometrie spielten aufgrund des
notwendigen Druckgehäuses eine besondere Rolle.

Sensoreinheit
des integrierten Navigationssystems
Basierend auf der druckneutralen
Technik wurde
ein neuartiger Computer entwickelt, der auf engstem Raum eine
beachtliche Rechenleistung bietet und im Betrieb für den
Einsatz
bis 6.000 Meter getestet wurde. Der Computer wird für die
Berechnung der Navigationslösung verwendet, lässt
sich aber
aufgrund diverser Schnittstellen auch für viele andere
Tiefseeanwendungen nutzen.
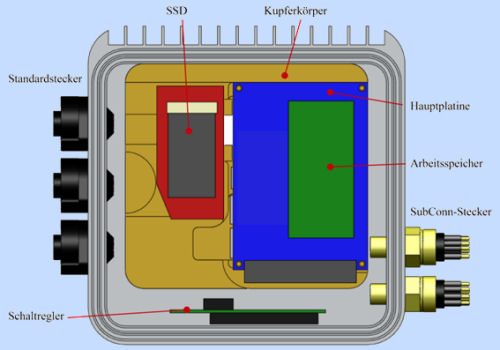
3D-CAD-Zeichnung
des druckneutralen Computers
Der Navigationsrechner durchlief über ein Jahr zahlreiche Tests und Erprobungen. Da bei dem druckneutralen Ansatz des Navigationsrechners besonders der Einfluss der Druckbelastung von Interesse ist, wurde dieser über längere Zeit mit 600 bar belastet. Auch häufige Druckwechsel wurden bei der Erprobung erfolgreich durchgeführt.
In der unteren Abbildung ist das
gesamte System
aus inertialer Messeinheit und druckneutralem Computer dargestellt.
Eingebaut im AUV berechnet der Computer aus allen zur
Verfügung
stehenden Messdaten mithilfe des Navigationsalgorithmus und eines
stochastischen Filters die wahrscheinlichste Position des unbemannten
Fahrzeugs.
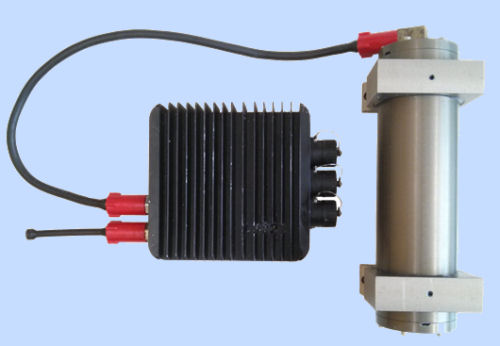
Druckneutraler Computer (links) mit inertialer Sensoreinheit (rechts)
Das gesamte System konnte in
verschiedenen
Einsatzfahrten mit dem druckneutralen Unterwasserfahrzeug PreToS
getestet werden. In der folgenden Abbildung ist eine Detailansicht
der PreToS mit eingebautem System zu sehen.
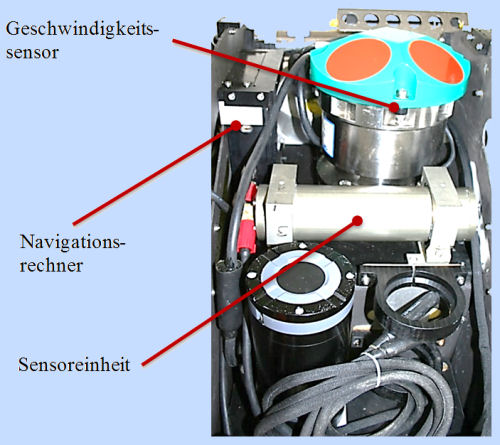
Eingebautes integriertes Navigationssystem
Die Ergebnisse der Testfahrten in
der Ostsee
und im Atlantik zeigten, dass durch die Kombination der akustischen
Navigation mit dem entwickelten Inertialnavigationssystem,
das auf die
Eigenschaften des autonomen Unterwasserfahrzeug PreToS abgestimmt ist,
ein integriertes Navigationssystem vorliegt, das im Vergleich zur
akustischen Positionsbe-stimmung sowohl zu einer Verbesserung der
Genauigkeit der Positionsbestimmung als auch zu einer zeitlich
hochaufgelösten Navigationslösung führt.
Auch bei einem
Ausfall der akustischen Positionsbestimmung ist das entwickelte System
in der Lage, ein sicheres Auftauchen des Fahrzeugs zu garantieren.

Das mit dem entwickelten Navigationssystem ausgestattete Unterwasserfahrzeug PreToS, kurz vor dem Abtauchen in den Atlantischen Ozean