Pinguin-AUV „PreToS“Dr.-Ing. Oliver Preradović
|
Die Gewinnung von Erdöl aus dem Meer umfasst gegenwärtig ein Drittel der weltweiten Erdölförderung. Neben fossilen Brennstoffen, wie Erdöl und Erdgas, bieten die wasserbedeckten Erdteile ein großes Vorkommen von Erzen und Mineralien. Durch die sinkende Verfügbarkeit von natürlichen Rohstoffen an Land wird das Meer als Lieferant von Brennstoffen und Erzen immer interessanter. Dabei rückt vor allem die Tiefsee auf Grund der bisher ungenutzten Ressourcen in den Fokus.
Bei der Suche
nach diesen Bodenschätzen, der Kartographierung von
großflächigen Gebieten, der Aufnahme von Boden- und
Wasserproben, aber auch zum Aufbau und zur Inspektion von Einrichtungen
im Meer wird auf technisch hoch entwickelte Unterwasserfahrzeuge
zurückgegriffen, die den dort vorherrschenden extremen Bedingungen
widerstehen können. Das größte Problem stellen die
korrosiven Eigenschaften des Meerwassers und der enorme hydrostatische
Druck dar, welcher mit zunehmender Tiefe ansteigt. In einer Vielzahl
von Unterwasserfahrzeugen werden daher zum Schutz der
Fahrzeugkomponenten dicke Druckhüllen eingesetzt.
Mit dem
erfolgreichen Abschluss des vom Bundesministerium für Wirtschaft
und Technologie (BMWi) geförderten Forschungsprojekts
„Druckneutrale Systeme“ wurde mit dem Unterwasserfahrzeug
„DNS Pegel“ eine Testplattform geschaffen, die im Gegensatz
zu der üblichen Bauweise gezeigt hat, dass sich fast alle
Komponenten in druckneutraler Bauweise gestalten lassen. Hierbei wird
grundsätzlich der Ansatz verfolgt, bei allen Fahrzeugkomponenten
gasgefüllte Hohlräume zu vermeiden. Der Wasserdruck wird
über Vergussmassen auf die Bauteile übertragen.

PreToS bei der Erprobung in der Ostsee
In dem Nachfolgeprojekt „Druckneutrale Systeme für die Tiefsee“ wurde ein Unterwasserfahrzeug aufgebaut, welches mit dem Einsatz von druckneutraler Technik Missionen in einer Tiefe von 6.000 Meter durchführen wird. Das Fahrzeug mit dem Namen PreToS (englisch: Pressure Tolerant Systems) wurde am Fachgebiet Mikrotechnik der Technischen Universität Berlin in Zusammenarbeit mit drei Projektpartnern entwickelt und weist einige bisher noch nicht da gewesene Merkmale auf, die sich vor allem in der Gestaltungsweise des Fahrzeugkörpers und des inneren Aufbaus wieder spiegeln.
Durch den begrenzten Energievorrat, den ein solcher Fahrzeugtyp, ein so genanntes Autonomous Underwater Vehicle (AUV), besitzt, bestimmt die Körperform durch den Strömungswiderstand den Energieverbrauch im Fahrbetrieb und damit die Dauer einer Mission. Schließlich wird dadurch die Datenmenge beschränkt, die ein Meeresforscher innerhalb eines Einsatzes sammeln kann. Daher ist es wichtig, dass ein AUV eine möglichst widerstandsarme Gestalt aufweist.--
Idealisierte Pinguinform--
Umfangreiche Recherchen zeigten, dass sich bei
einer Pinguin-ähnlichen Körperform für das Fahrzeug bei
einer angestrebten Fortbewegungsgeschwindigkeit von vier Knoten ein
minimaler Fahrwiderstand ergibt. Der Strömungskörper des
Unterwasserfahrzeugs wurde aus diesem Grund einer idealisierten
Pinguinform nachempfunden. Die gesamte Fahrzeugoberfläche wird mit
Hüllen aus tief gezogenem Acrylnitril-Butadien-Styrol (ABS)
abgedeckt, welches eine glatte, wachsartige Oberfläche aufweist.

Kaiserpinguin in der Antarktis
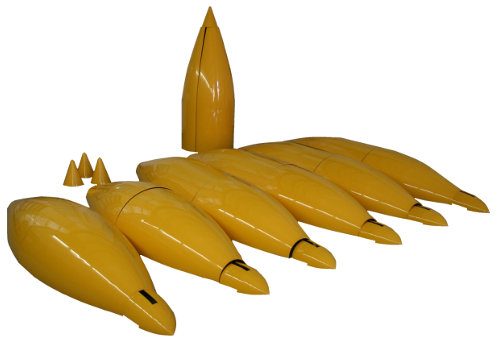
Strömungshüllen des Unterwasserfahrzeugs aus ABS
Neben der äußeren Gestalt ist die innere Struktur ein weiteres wesentliches Kriterium für die Entwicklung eines Unterwasserfahrzeugs. Der innere Aufbau beeinflusst das Fahrzeuggewicht maßgeblich. Ein hohes Gewicht erschwert die Handhabung und macht größere Arbeitskräne oder komplexe Ausbring- und Bergevorrichtungen erforderlich, woraus ein erhöhter Arbeits- und Zeitaufwand resultiert.
Die innere Fahrzeugstruktur dient im
Wesentlichen der Aufnahme der einwirkenden Kräfte und der
Befestigung von Einbauten. Der gesamte Rahmen von PreToS wird aus
Titan-Blechen gebildet, die in Form von Spanten, Kästen, Winkeln
und kleineren Profilen eingesetzt werden und das Fahrzeug in acht
Sektionen, die unterschiedliche Fahrzeugkomponenten aufnehmen, teilen.
Als tragende Struktur erfüllt der Rahmen die Funktion eines
Skeletts und sorgt für Stabilität. Eine
KEPLA-COAT-Beschichtung schützt das Titan vor Korrosion sowie
Verschleiß und reduziert die elektrisch aktive Oberfläche
des gesamten Rahmens.
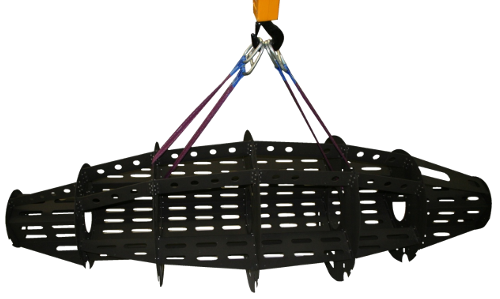
Rahmenstruktur des Unterwasserfahrzeugs
Die Rahmenstruktur bietet eine hohe
Flexibilität und lässt sich auch im weiteren
Entwicklungsprozess mit wenig Aufwand an neue Gegebenheiten anpassen.
Ein nachträgliches Einbringen von Befestigungsmöglichkeiten
ist ohne große Mühen und an jedem Ort durchführbar. Der
Aufbau erlaubt den Einbau einer zusätzlichen Nutzlastsektion, in
der verschiedene, missionsspezifische wissenschaftliche Geräte
eingesetzt werden können.
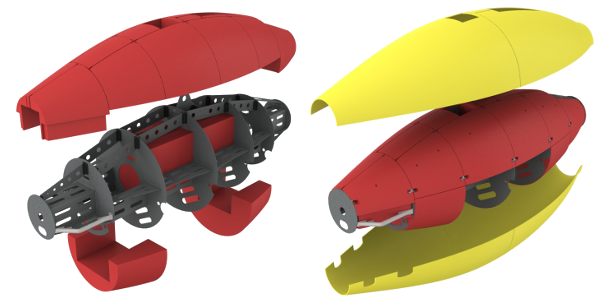
Fahrzeugaufbau:
Auftriebsmaterial (rot) Hüllensegmente (gelb) Rahmenstruktur (schwarz)
Der Innenraum des Fahrzeugs weist eine
horizontale Zweiteilung auf. Während in der oberen
Fahrzeughälfte das gesamte für das Schwimmverhalten
erforderliche Auftriebsmaterial untergebracht ist, sind in der unteren
Fahrzeughälfte alle Instrumente und für den Betrieb des
Fahrzeugs notwendigen Komponenten eingebaut. Der Auftrieb erzeugende
syntaktische Schaum ist ein Epoxidharz-Gemisch mit eingebetteten
mikroskopisch kleinen Glashohlkugeln. Diese Teilung des
Fahrzeugvolumens bewirkt ein sehr stabiles Fahrverhalten sowohl bei
Tauchfahrten als auch bei Fahrten über Wasser.

PreToS an Bord des Forschungsschiffs Elisabeth Mann Borgese
Die gesamten Entwicklungen führten zu
einem äußerst leistungsfähigen und wendigen
Unterwasserfahrzeug, welches in der Lage ist, verschiedene Aufgaben in
der Tiefsee zu meistern. Im Zeitraum vom September 2011 bis September
2012 fanden mehrere erfolgreiche Tests in und auf der Ostsee statt. Im
Herbst 2013 soll das AUV eine Reihe von Missionen in dem Tiefsee-Becken
vor der Insel Madeira in Wassertiefen bis zu 6.000 Meter
durchführen, welche die Höhepunkte des Projekts darstellen.

PreToS auf dem Arbeitsdeck des Forschungsschiffs Elisabeth Mann Borgese

Erprobung des Fahrzeugs mit einer Nutzlastsektion
Projektpartner
ENITECH Energietechnik Elektronik GmbH, Bentwisch / Rostock
EvoLogics GmbH, Berlin
Fachgebiet Mikrotechnik der Technischen Universität Berlin
Leibniz-Institut für Ostseeforschung Warnemünde
Die Ergebnisse dieser Entwicklung sowie weitere
für das Forschungsprojekt notwendige und realisierte Systeme sind
in meiner Dissertation ausführlich dargelegt:
Gestaltung
eines autonomen Unterwasserfahrzeugs mit elektromagnetischer
Auftauchvorrichtung und multifunktionalem Transportsystem
Mein Dank gilt Herrn Prof. Dr. Heinz Lehr für die Chance, in diesem einzigartigen Forschungsprojekt mitzuarbeiten. Meinen Kollegen Johannes Gelze, David Mischnick, Eugen Olenew und Tino Schmidt danke ich für die gute Zusammenarbeit und den enormen Teamgeist. Bei Romon Chakrabarti, Max Fandrich, Ralph Hartmann und Stefan Oginski möchte ich mich für die tatkräftige Unterstützung bedanken.
Dem Bundesministerium für Wirtschaft und
Technologie / Projektträger Jülich sei für die
finanzielle Förderung dieses Projekts gedankt.
Förderkatalog: foerderportal.bund.de Förderkennzeichen: 03SX276A
 |
 |
--

PreToS am Kran des Forschungsschiffs