Mobile
Roboter finden zunehmend Anwendung in Forschung und Lehre. Durch die
Integration miniaturisierter Antriebssysteme und verschiedener Sensoren
entstehen flexible und leistungsfähige Arbeitsplattformen, die
eine Vielfalt von Bewegungsabläufen bis hin zur Programmierung
autonomer Systeme ermöglichen. Der Anwender gewinnt dabei Einblick
in den Aufbau sowie das Zusammenspiel der Komponenten mechatronischer
Systeme.
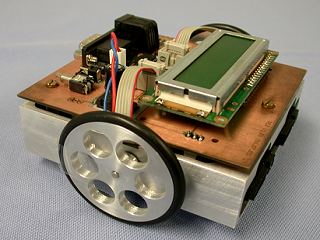
PER
(Programmable Education Robot) wird insbesondere in der Lehre
eingesetzt, mit dem Ziel, die Grundlagen der Assemblerprogrammierung zu
vermitteln. PER verfügt über einen 8-Bit-Mikrokontroller, der
zwei Gleichstrommotoren getrennt ansteuert und über
Inkrementalgeber kontrolliert. Damit kann PER fast jede Kurve steuern
und insbesondere mit Hilfe zweier Triangulationssensoren Hindernisse
lokalisieren sowie diese umfahren. Ein LC-Display erlaubt die lokale
Ausgabe von Informationen.
Eigenschaften
robustes, gut überschaubares Gesamtkonzept
hohe Flexibilität durch integrierte Sensoren und getrennt ansteuerbare Motoren
viele Funktionsunterprogramme verfügbar
Schnittstelle für das Laden von Assemblerroutinen, z. B. auf einem PC entwickelt
modular aufgebautes System läßt sich durch die Integration weiterer Funktionen erweitern