|
Ein aktives Trimmsystem
für das AUV PreToS
Dr.-Ing. Tino Schmidt
--
Die Erdoberfläche ist zu
70 Prozent von
Wasser bedeckt. Dennoch sind sowohl die Meere als auch der
Meeresboden kaum erschlossen und weitestgehend
unbekannt. Die Rohstoffknappheit an Land führt in
Kombination mit dem zunehmenden Bedarf zu steigenden
Preisen. Dagegen bietet das Meer mit potentiellen
Rohstofflagerstätten eine
attraktive Alternative, da die Erschließung neuer
Rohstoffvorkommen an Land aufwendig und teuer wird. Während
die Kartografie der Landmassen der Erde mithilfe von Flugzeugen
und Satelliten verhältnismäßig einfach zu
bewerkstelligen ist, stellt die
Erforschung des Meeres sowie des Meeresbodens hohe
Anforderungen an die Unterwassertechnik.
-
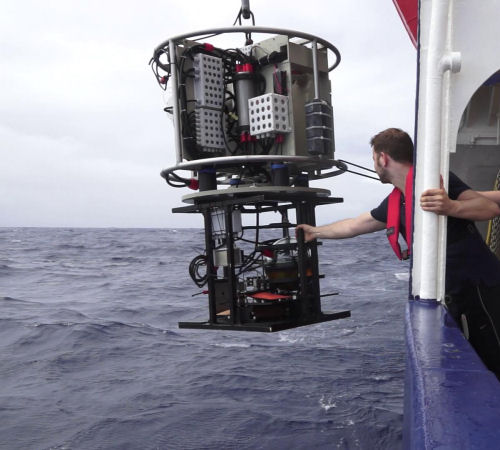
Das
AUV PreToS im Atlantischen Ozean
-
Widrige Umweltbedingungen wie
schlechte Sicht, tiefe Temperaturen, starke Strömungen
sowie Schwierigkeiten bei der Kommunikation und
Energieübertragung erschweren eine
detaillierte Kartografie des Meeresbodens. Die
größte Herausforderung stellt jedoch die
Tiefe der Meere dar. Der damit verbundene hydrostatische
Druck steigt je zehn Meter Tiefe um ungefähr ein bar.
Zudem ist eine Erforschung der Ozeane kostenintensiv. Deshalb
besitzen nur wenige Länder die
erforderliche Technik, um in große
Tauchtiefen vordringen zu können.
Das Bundesministerium für
Wirtschaft und
Energie (BMWi) förderte im Rahmen des maritimen
Verbundprojekts
„Druckneutrale Systeme für die Tiefsee“
die
Entwicklung von Unterwassertechnik mit über fünf
Millionen
Euro.
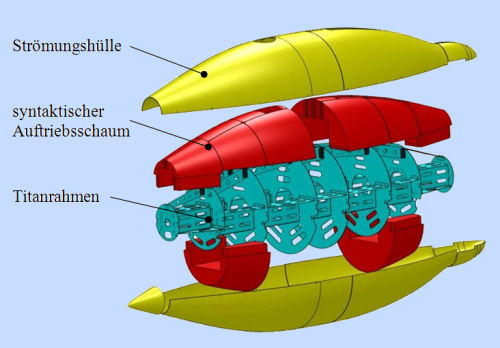
Grundstruktur
des Unterwasserfahrzeugs PreToS
-
Der grundlegende Aufbau der PreToS
ist
oben zu sehen. Das Fahrzeug ist komplett geflutet und nach dem
druckneutralen Konzept aufgebaut. Der Titanrahmen (blau)
bildet das tragende Gerüst und nimmt alle auftretenden Lasten
auf.
Weiterhin dient er als Befestigungsgestell für alle
Einbaukomponenten. Der mittlere Teil des AUVs ist eine
Nutzlastsektion, die sich modular auswechseln oder erweitern
lässt. Um bei der angestrebten Tauchtiefe von 6.000 Meter
einen
neutralen Auftriebstrimm zu erreichen, muss die Masse der an
der Unterseite des AUVs eingebauten Geräte kompensiert
werden. Realisieren lässt sich dies mit syntaktischem
Auftriebsschaum (rot). Dieser befindet sich vor allem an
der Oberseite des AUVs. Dadurch sind Masse- und
Auftriebsschwerpunkt soweit wie möglich voneinander
entfernt, damit eine möglichst stabile Lage des
AUVs im Wasser sichergestellt ist. Den äußeren
Abschluss bildet eine strömungsgünstig geformte
Hülle (gelb). Sie verhindert Turbulenzen und reduziert den
Strömungswiderstand. Dadurch kann die PreToS
energiesparend fahren und erreicht lange Einsatzzeiten.
AUVs sind generell
auftriebsneutral oder leicht positiv getrimmt. Soll
das AUV abtauchen oder die Tauchtiefe halten, muss das
Fahrzeug vorwärts fahren, und die Ruder müssen
angestellt sein. Das Kartografieren, eine der Hauptaufgaben
von AUVs, ist damit problemlos möglich. Ist es jedoch
gewünscht, dass das Fahrzeug Kameraaufnahmen
fester Objekte macht, kann es notwendig sein, dass es
bei ausgeschalteten Hauptantrieben die
Tauchtiefe beibehält. Weiterhin benötigen
AUVs beim Abtauchen sehr viel Energie, weil sie aktiv in die
Tiefe fahren und dabei den positiven Auftrieb
ausgleichen müssen. Dies bedeutet, dass die
dafür benötigte Energie die Einsatzzeit des
Fahrzeugs deutlich reduziert. Schließlich kann das
Trimmsystem den Auftauch- und Abtauchprozess
unter Einsatz von begrenzter Energie unterstützen
und einen neutralen Trimm des Fahrzeugs herstellen. Damit
lässt sich eine Tiefenregelung durchführen, und das
Fahrzeug ist leichter manövrierbar, da kein Anteil des
Vorschubs durch den Hauptantrieb in eine Vertikalbewegung
einfließen muss.
Mit zunehmender Tiefe
erhöht sich die Dichte des Meerwassers, so
dass das Fahrzeug mehr Auftrieb generiert. Gleichzeitig erzeugt die
Druckzunahme in der Tiefe eine Volumenabnahme der
Materialien des AUVs. Dadurch entsteht weniger Auftrieb des
Fahrzeugs. Zusätzlich gibt es Sprungschichten im
Wasser, weil sich der Salzgehalt und die Temperatur
plötzlich ändern. Die Auftriebsänderung hat
einen nicht
vorhersehbaren Einfluss auf die
Unterwasserfahrzeuge. Es ist möglich, dass diese
durchsacken und beispielsweise auf dem
Meeresboden aufschlagen, was einen Fahrzeugverlust
zur Folge haben könnte. Diese
seewasserabhängigen Abweichungen des
Auftriebs lassen sich durch ein Trimmsystem
ausgleichen, wodurch sich die Sicherheit im
Einsatz erhöht.
Das neu entwickelte Trimmsystem
stellt eine Innovation für
propellergetriebene AUVs dar und bietet zahlreiche Vorteile
für
die PreToS. Durch die Verwendung eines aktiven Trimmsystems
lässt
sich teure und begrenzte Schiffszeit einsparen.
Außerdem können Auftriebs- und
Lagetrimmverschiebungen infolge von
Komponentenaustausch, -einbau und -ausbau
kompensiert werden.
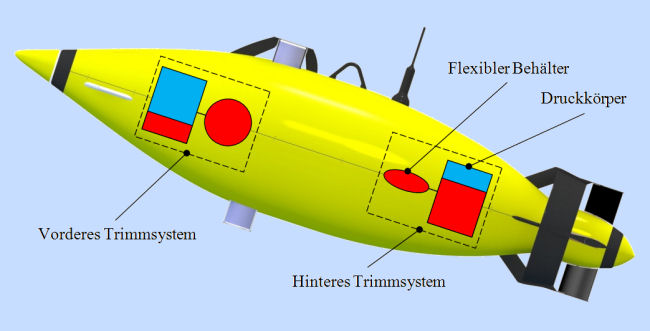
Verwendung
des Trimmsystems zur Lageänderung
-
Das Auftriebssystem der PreToS
besteht aus zwei
baugleichen ölgepumpten Systemen, von denen sich
eines im Bug und eines im Heck befindet.Durch die Nutzung
verschiedener Einsatzarten lässt sich sowohl die
Auftriebskraft des AUVs einstellen als auch der Nickwinkel
verändern. Der modulare und platzsparende Aufbau schafft die
Voraussetzungen für einen schnellen Ein- und
Ausbau und ermöglicht dadurch eine einfache
Erprobung des Systems.
Die für das Trimmsystem
eingesetzten Einzelkomponenten wurden im
fachgebietseigenen Drucktank einer Tauglichkeitsprüfung
für
den Tiefseeeinsatz unterzogen. Nachdem das
Versuchsmuster des aktiven Trimmsystems aufgebaut war,
erfolgten Tests in einem Geräteträger in der Ostsee
und
im Atlantischen Ozean. Dadurch ließen sich
Fehlfunktionen identifizieren und beheben, wodurch sich das
Versuchsmuster iterativ verbessern ließ.
Anschließend wurden zwei Trimmsysteme in das AUV PreToS
integriert und in der Schlepprinne der TU Berlin sowie in der
Ostsee erprobt.
-

Das
AUV PreToS mit negativem Nickwinkel in der Schlepprinne
-
Zum Ändern des
Systemvolumens und damit
der erzeugten Auftriebskraft lässt sich Hydraulikfluid
zwischen einem Druckkörper aus Glas und einem flexiblen
Behälter verschieben. Dabei bleibt die Systemmasse konstant
und
das verdrängte Volumen variiert.
Druckkörper
mit Hochdruckpumpe und Ventilen
-
Im druckfesten Körper
befindet sich eine
Hochdruckpumpe, welche das Fluid durch ein Rückschlagventil in
den
flexiblen Behälter befördert. Das
Zurückfließen in
den Druckkörper steuert ein 2 / 2-Wege-Magnetventil, ein
Hochdruckventil der Firma Walter Schumacher Impuls Technik GmbH. Es ist
stromlos geschlossen, und der Stößel mit dem
Dichtungszylinder lässt sich zur Öffnung des Ventils
per
Reluktanzkraft mit einer Magnetspule anziehen. Da die mitgelieferte
Magnetspule nicht im Wasser einsetzbar ist, musste eine druckneutral
aufgebaute Spule hergestellt, erprobt und iterativ verbessert werden.
Die Spule befindet sich in einem magnetisch leitenden
Rückschlusstopf, der sich mit einem Deckel
verschließen
lässt. Die Auslegung der Wandstärken des
Rückschlusskörpers erfolgte mit dem FEM-Programm
MAXWELL. Der
Spulenkörper wurde mit einem neuartigen und mehrstufigen
Verguss
aus zwei Silikonarten umschlossen, um ihn vor dem korrosiven Seewasser
zu schützen. Versuche im Labor, in der Ostsee und in der
Tiefsee
zeigten den erfolgreichen Dauereinsatz der Spule an Luft und im Wasser,
wobei die druckneutrale Magnetspule bei verschiedenen Temperaturen und
hohem Umgebungsdruck ein sicheres Öffnen des Hochdruckventils
ermöglichte.
Sensoren ermitteln den
Füllstand der
Druckkugel und den Volumenstrom zwischen den Fluidbehältern.
Zur
Volumenstromüberwachung wurde ein Durchflusssensor verwendet.
Die
marktüblich erhältlichen Durchflusssensoren weisen
entweder
unzureichende Wiederholgenauigkeiten auf oder sie benötigen
viel
Bauraum, da sie im Offshore-Öl-Bereich eingesetzt werden und
für Rohrdurchmesser von mehreren Zentimetern ausgelegt sind.
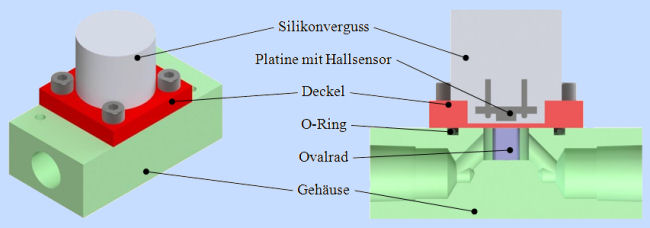
-
Eigenentwicklung
des Durchflusssensors, links: ISO-Ansicht, rechts: Schnittansicht
-
Deswegen erfolgte eine
Eigenentwicklung eines
druckneutralen Durchflusssensors nach dem Verdrängungsprinzip
mit
Ovalrädern zur Messung von nicht leitenden
Hydraulikflüssigkeiten für einen Durchfluss
über 0,5
Liter pro Minute. Die Ovalräder befinden sich in einem
Kunststoffgehäuse, um die Beständigkeit gegen
Korrosion zu
gewährleisten. Die Drehzahl der Ovalräder
ermöglicht
einen Rückschluss auf die durchgeflossene Volumenmenge und
lässt sich mittels eines im Deckel druckneutral vergossenen
Hallsensors, der die Feldänderung der Permanentmagneten in den
Ovalrädern detektiert, ermitteln.
-
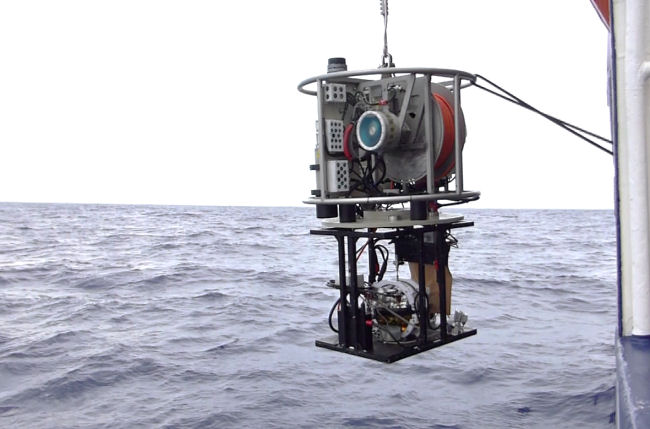
Das
Trimmsystem bei einer Tiefseeerprobung
-
Bei den Ostsee- und
Tiefseeerprobungen zeigte
der Durchflusssensor seine hervorragende Eignung für den
Einsatz
in der Tiefsee und lieferte verlässliche Werte, die essentiell
für den Erfolg des Trimmsystems waren.
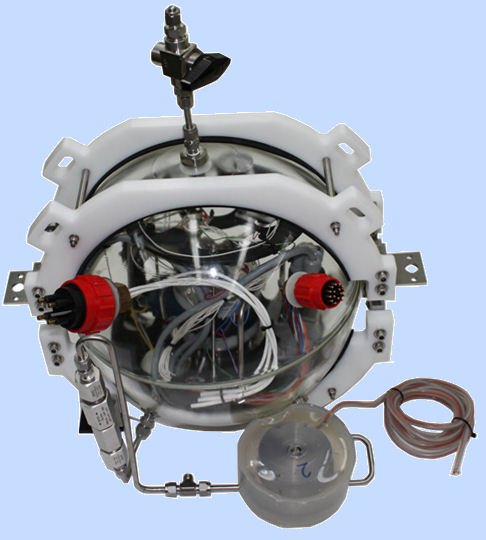
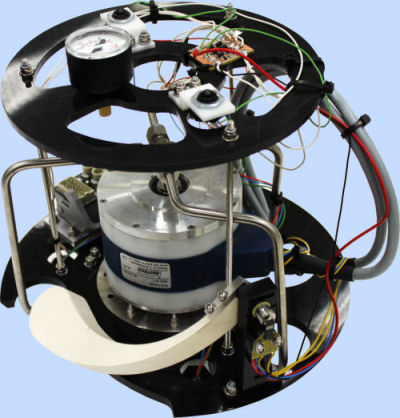
Zur Bestimmung der Fluidmenge in
der Druckkugel
wurde ein Füllstandssensor entwickelt, der nach dem
Schwimmer-Verfahren funktioniert. Der Schwimmerhebel ist drehbar
gelagert und besteht aus syntaktischem Auftriebsschaum, so dass er auf
der Fluidoberfläche schwimmt und somit dem Füllstand
in der
Druckkugel folgt. Der Drehwinkel des Schwimmerhebels steht in direktem
Zusammenhang mit dem Füllstand in der Druckkugel und
lässt
sich mit einer Kombination aus einem Diametralmagneten und einem
Magnetfeldsensor ermitteln.
-
Innerer
Aufbau der Druckkugel mit dem Füllstandssensor
-
Die sichere Funktion des aktiven
Trimmsystems
in der Tiefsee ließ sich im Verlauf mehrerer
Schiffsmissionen nachweisen. Dies betrifft die hydraulischen
Steuerungen mit der verwendeten Hochdruckpumpe und dem auf
Tiefseebedingungen umgestalteten Hochdruckventil. Außerdem
gelang
die Überwachung des Fluidtransports mit zwei neu entwickelten
druckneutralen Sensoren, dem Durchflusssensor und dem
Füllstandssensor. Als zentrales Kommunikationselement wurde
ein
Mikrocontroller eingesetzt, der für die
Datenübermittlung zum
Steuercomputer und zur Ansteuerung des Hochdruckventils sowie zur
Sensorauswertung genutzt wurde.
-
Das aktive Trimmsystem auf dem Weg in die
Tiefen des Atlantischen Ozeans
-
Nach der erfolgreichen
Tiefseeerprobung des
Versuchsmusters wurden zwei identische Systeme in das AUV integriert.
Die PreToS ließ sich infolge des negativen Auftriebs der
beiden
Systeme auf dem Meeresboden der Ostsee absetzen, siehe Abbildung unten.
-
Mittels
Trimmsystem auf dem Meeresgrund abgesetztes AUV
-
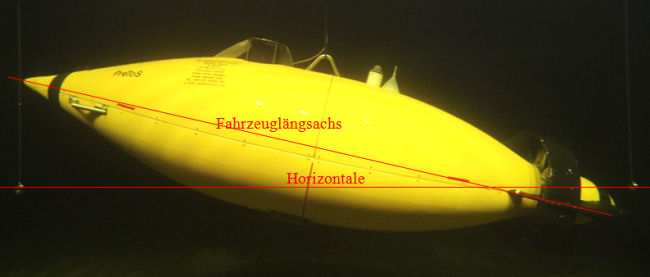
Durch die Verwendung zweier
redundanter
Trimmsysteme im AUV ließ sich neben dem Gesamtauftrieb auch
der
Nickwinkel verändern. Dabei wurden Winkel von + 13°
und
− 6° erzielt. In der unteren Abbildung ist die PreToS
mit
einem durch die Trimmsysteme eingestellten positiven Nickwinkel zu
sehen.
-
Die
PreToS mit positivem Nickwinkel
-
Das aktive Trimmsystem wurde zwar
speziell
für das AUV PreToS entwickelt. Da es jedoch modular aufgebaut
und
flexibel einsetzbar ist, lässt es sich in alle Arten von
Unterwasserfahrzeugen integrieren, beispielsweise in AUVs, ROVs,
Unterwassergleiter oder auch bemannte U-Boote.
Alle oben genannten Ergebnisse
sind in meiner Dissertation ausführlich beschrieben:

Projektpartner im
Forschungsverbund "Druckneutrale Systeme für die Tiefsee":
ENITECH Energietechnik Elektronik GmbH, Bentwisch / Rostock
EvoLogics GmbH, Berlin
Fachgebiet Mikrotechnik der Technischen Universität Berlin
Leibniz-Institut für Ostseeforschung Warnemünde
Dem Bundesministerium für Wirtschaft und Technologie /
Projektträger Jülich gilt der Dank für die
finanzielle
Förderung dieses Projekts.
Förderkatalog:
foerderportal.bund.de
 |
Förderkennzeichen:
03SX276A
 |
|
|
|