10 B Abenteuer Tiefseetechnik, das Unterwasserfahrzeug PreToS
IV Atlantikfahrt und Präsentation der Projektergebnisse
Atlantikfahrt mit dem Forschungsschiff Poseidon, September und Oktober 2013
Bei dieser Atlantikfahrt sollte die PreToS anhand der Messung von Temperaturgradienten bei Tauchmanövern bis zu einer Tiefe von 400 Meter den Verlauf der so genannten Azorenfront bestimmen, die das kalte nährstoffreiche Wasser des Nordostatlantiks vom warmen nährstoffarmen Wasser der Subtropen trennt. Die Azorenfront verläuft im Madeirabecken, zwischen den Azoren und den Kanarischen Inseln und ist ein wichtiger Faktor für die Entwicklung des Wetters sowie des Klimas in Europa. Da sie sich in den letzten Jahren sukzessive in nördliche Richtung bewegt, unterliegt sie ständiger Beobachtung.
Von den vorherigen Fahrten kannten wir den starken Wellengang im Atlantik und waren uns bewusst, dass die Aussetz- und Bergemanöver mit Seil und Kran zu einer Gefährdung des Boots führen. Somit war der Einsatz des LARS (Launch and Recovery System), welches wir in der Ostsee mehrfach erprobt und sukzessive verbessert hatten, bei diesem Atlantikeinsatz dringend erforderlich. Tatsächlich bewährte sich das LARS auf dieser Mission bei mehreren Tauch- und Forschungseinsätzen, wobei der Vorteil der Konstruktion insbesondere bei höherem Wellengang hervortrat. Dies verdeutlicht die folgende Bilddokumentation eines Bergevorgangs:
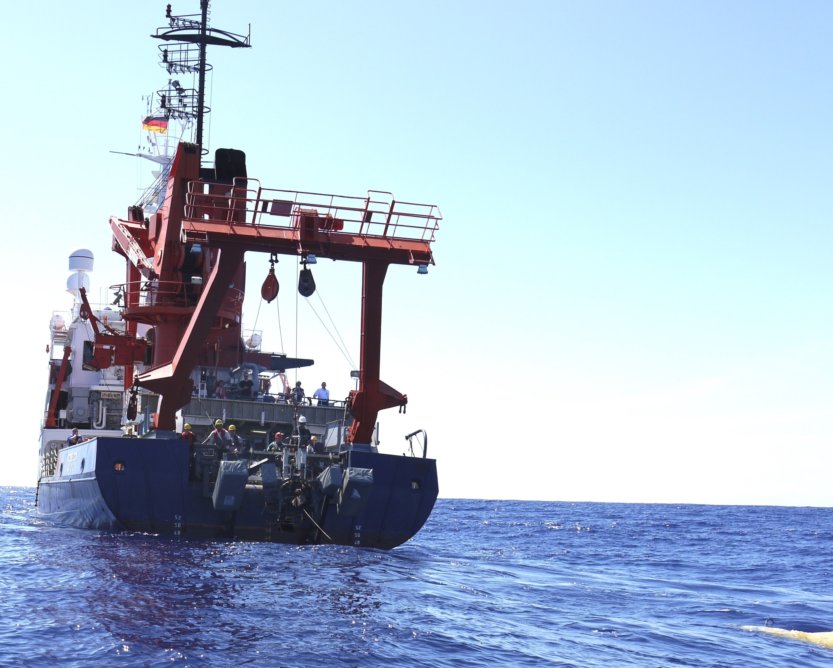
Nach dem Ende einer Tauchfahrt fährt die PreToS an das Forschungsschiff heran, auf dessen Heck die Aufbauten des LARS installiert sind.

um den Schwimmkörper nebst Fangseil auszustoßen
Das Boot geht längsseits zur Poseidon und stößt den Schwimmkörper und das Fangseil aus, welches ein Mitglied der Besatzung mit einem Enterhaken aus dem Wasser aufnimmt und danach auch den Schwimmer einholt.


FMT-Mitarbeiter entfernen den Schwimmer vom Seilende und koppeln das Seil an die elektrische Winde des Bergekäfigs. Es folgt die Absenkung des Auslegers und des Käfigs mittels A-Kran.
das Seil der PreToS (Bildecke rechts unten) ist mit der Winde des Käfigs verbunden
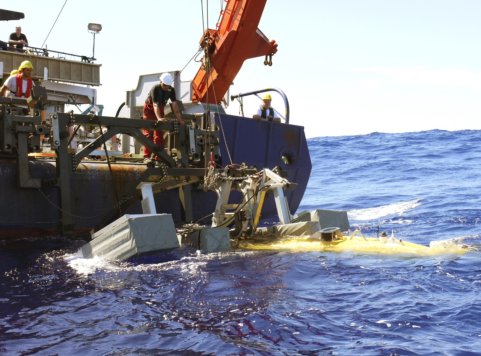
Der Bergekäfig schwimmt jetzt bei leichter Vorwärtsfahrt der Poseidon im Wasser. Die Winde des Käfigs zieht die PretoS an diesen heran und hält das Boot schließlich im Käfig. Der Rastbügel ist in den nächsten beiden Bildern noch nicht abgesenkt.

Erst die Absenkung des Rastbügels und die Verriegelung des Schließbolzens mit dem Bowdenzug sorgen für eine feste mechanische Kopplung des Boots mit dem Käfig. Das Boot ist damit gesichert und lässt sich, fixiert im Bergekäfig, mittels A-Kran und Ausleger auf das Heck des Schiffs hieven.

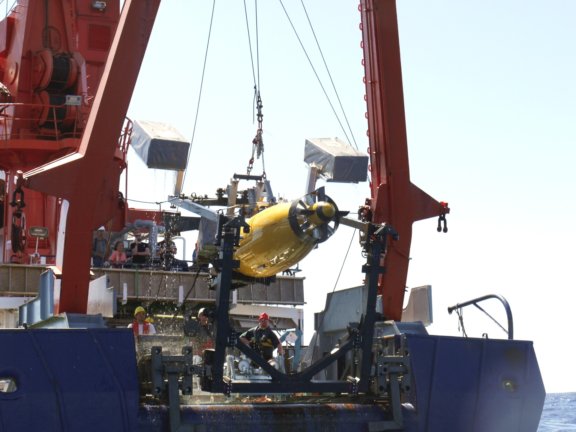
Nun gilt es, den Käfig mit der PreToS an Bord zu hieven.

Die folgende Bildserie dokumentiert die einzelnen Phasen des Einholvorgangs der PreToS mit dem Ausleger und dem Käfig, unterstützt durch den A-Kran.


Die PreToS wird schließlich auf der Helling abgelegt und auf Schäden kontrolliert. Es folgen die Überprüfung einzelner Systeme sowie die Aufladung der Akkumulatoren, wonach das Boot für eine weitere Tauchmission zur Verfügung steht.

Im Vergleich zu den Einsätzen in der Ostsee traten im Atlantik beim Aussetzen und Bergen des AUVs infolge des höheren Wellengangs und der Schiffsbewegungen erhebliche Unterschiede auf. Dies zeigen die nächsten beiden Bilder, bei denen die Distanz der Heckkante des Schiffs von der Wasseroberfläche erheblich differiert, was konventionelle Aussetz- und Bergemanöver mit Kran und Seil undurchführbar macht.


Bei solch einem Hub ließe sich das Boot mit dem Kran keinesfalls schadensfrei aussetzen oder aufnehmen. Die beweglichen Ausleger am LARS ermöglichen dagegen die Entkopplung der Schiffsbewegung von der Auf- und Ab-Bewegung des Käfigs in den Wellen, so dass ein Aussetzen und Bergen des Boots selbst bei schwierigen Verhältnissen möglich ist. Allerdings erlebten wir auch Wetterzustände im Atlantik, bei denen es sich verbietet, die PreToS auszusetzen, siehe folgendes Bild.

Im Verlauf dieser Atlantikfahrt führte die Crew der PreToS mit dem AUV einige Tauchfahrten für hydrographische Messungen durch, wobei sich anhand des akustischen Modems alle Tauchgänge sehr gut steuern und kontrollieren ließen. Insgesamt gelang damit der Nachweis, dass die PreToS auch bei den rauen Bedingungen des Atlantiks alle Anforderungen erfüllt, was sich zu einem guten Teil auf den erfolgreichen Einsatz des Launch and Recovery Systems zurückführen lässt. Aus Zeitgründen war es allerdings nicht möglich, den Verlauf der Azorenfront zu bestimmen, da die Einsatzzeiten auf dem Forschungsschiff Poseidon mit mehreren Forschergruppen geteilt werden mussten.
Experimente mit dem Auftriebstrimmsystem, Dezember 2013 und Januar 2014
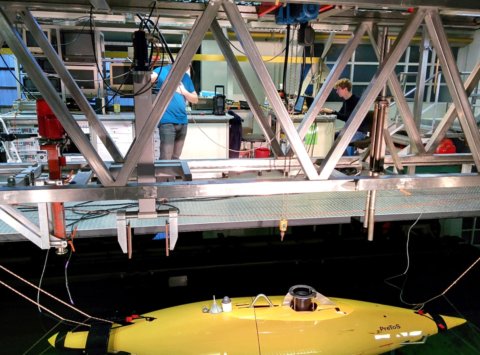
Im weiteren Verlauf des Projekts waren keine zusätzlichen Forschungsfahrten im Atlantik möglich. Wir nutzten daher die verbliebene Zeit, um die Effektivität des Auftriebstrimmsystems der PreToS genauer zu untersuchen und transportierten das Boot zunächst in die Schlepprinne der TU Berlin, wobei die dortige fahrbare Messbühne als Arbeitsplattform für den Aufbau der Messeinrichtungen diente. Das Boot befand sich unterhalb der Messbrücke im Wasser der Schlepprinne, siehe Bild unten.

Wie bei jedem U-Boot ermöglichen die in der PreToS eingebauten Tauch- und Trimmeinrichtungen Tauchgänge. Ziel der Messungen in der Schlepprinne war es, die Einsatzfähigkeit dieser Systeme beim Tauchen zu prüfen. Zunächst hing die PreToS an der zentralen Bergeöse, beschwert durch zusätzliche Gewichte und gehalten durch einen Kranhaken, vollkommen im Wasser. Das Boot war dabei horizontal neutral ausgerichtet. Steuert man die bug- und heckseitigen Trimmeinrichtungen unterschiedlich an, lässt sich der Schwerpunkt des Boots longitudinal verschieben, wodurch sich der Neigungswinkel des Boots ändert. Von Interesse waren insbesondere die maximalen positiven und negativen Nickwinkel, da diese bei einem Tauchgang die Zeitdauer für die motorgetriebene Fahrt zum Meeresgrund oder der Rückkehr zur Meeresoberfläche wesentlich mitbestimmen. Die folgenden Unterwasseraufnahmen der PreToS zeigen die erreichten Winkelstellungen infolge der Ansteuerung der Trimmsysteme. Zwei Ringe (Marker), die sich an gleich langen Seilen links und rechts des Boots befinden, indizieren jeweils die Horizontale, welche in die Bilder eingezeichnet wurden. Die ebenfalls eingefügten Fahrzeuglängsachsen verdeutlichen die jeweiligen Winkelstellungen.
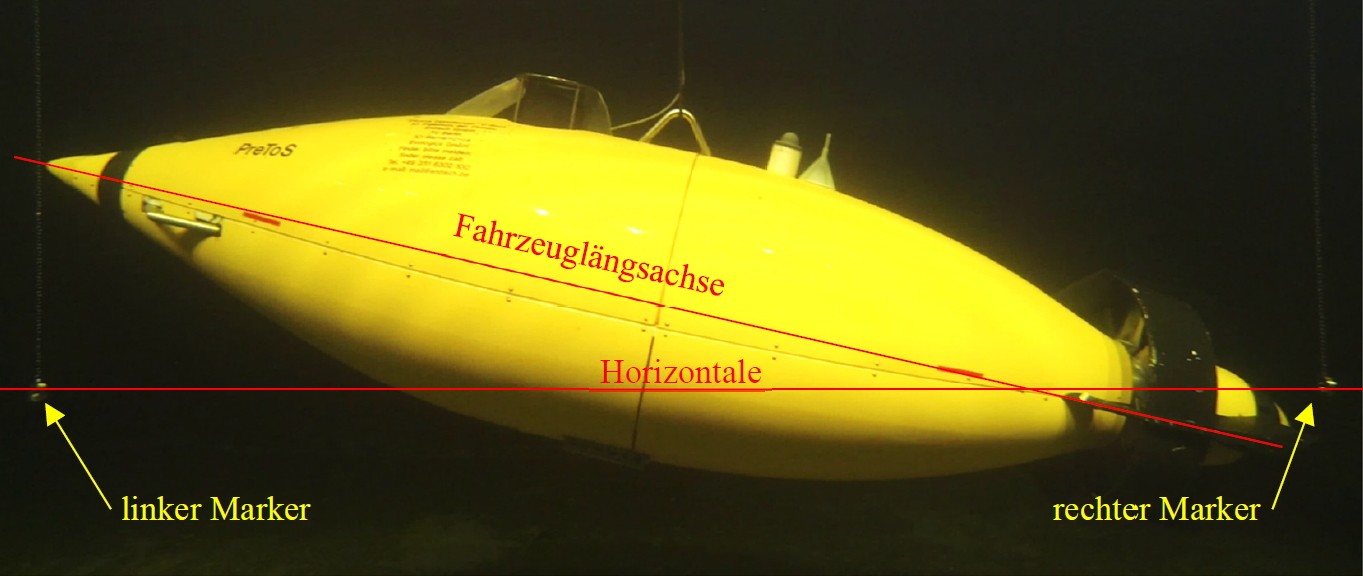

Die eigentliche Messung der Nickwinkel erfolgte mit dem in das AUV eingebauten Doppler Velocity Log und ergab Werte von + 13° für den positiven und - 6° für den negativen Nickwinkel, wobei die Steuerung der Arbeitsgänge sowie die Datenaufnahme von der Messbühne aus durch Johannes Gelze und Tino Schmidt erfolgte.

Die PreToS wurde zum Ende des Projekts nochmals in der Ostsee auf einer Fahrt mit der E. M. Borgese eingesetzt, um die Einsatzfähigkeit des Tauch- und Trimmsystems im praktischen Einsatz zu demonstrieren. Die Kontrolle der Taucheinsätze übernahm dabei der Bordcomputer der PreToS, wobei auch bei diesen Tests der Nickwinkel variiert wurde. Außer der Einstellung verschiedener Nickwinkel durch die gegensätzliche Ansteuerung der Taucheinrichtungen lag das Boot aufgrund der gleichsinnigen Ansteuerung beider Trimmsysteme durch deren Abtrieb auf den Meeresgrund, siehe folgendes Bild.

Präsentation der Projektergebnisse
OCEANS‘2011 in Hawaii
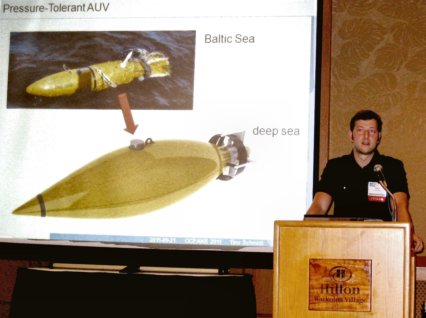
Im September 2011 berichteten Dipl.-Ing. Tino Schmidt und Dipl.-Ing., Dipl.-Phys. Johannes Gelze auf der Konferenz OCEANS‘2011 MTSIEEE in Kona, Hawai’i, über die bis zu diesem Zeitpunkt erreichten Projektergebnisse. Tino Schmidt (siehe Bild unten links) stellte bei seinem Vortrag das Konzept der Druckneutralität vor und beschrieb den Aufbau der PreToS, das Antriebs- und das Rudersystem, die Energieversorgung des Fahrzeugs, das Kommunikationssystem und die inertiale Navigationseinheit. Das Auditorium interessierte sich vor allem für den Skelettaufbau des Fahrzeugs und diskutierte lebhaft die Vor- und Nachteile der druckneutralen Technik.
Johannes Gelze (Bild unten rechts) präsentierte seine Entwicklung einer druckneutral gestalteten Unterwasserkamera, welche beliebige Tauchtiefen erreichen kann und geringe Herstellungskosten verursacht. Es entwickelte sich eine dynamische Diskussion der Konferenzteilnehmer, deren Fokus wiederum die druckneutrale Technik betraf.

In der Nähe der Tagungsstätte genossen Johannes und Tino ein spezielles Hawai’i Erlebnis, indem sie mit Riesenschildkröten um die Wette schwammen (siehe nächste Bilder).


AUV-Workshop in Ilmenau
Johannes Gelze gab im Juni 2013 auf dem 3. AUV Workshop in Ilmenau eine Übersicht der bisher erzielten Projektergebnisse, wobei er die Form und den Aufbau der PreToS, die Energieversorgung, den Hauptantrieb, die Ruderanlage sowie die Einbauten im Payloadsektor beschrieb. Er stellte sehr ausführlich das LARS-Konzept vor und untermauerte seinen Vortrag mit kurzen Filmen, welche Einsätze der PreToS in der Ostsee sowie auch Aussetz- und Bergungsvorgänge mit dem LARS zeigten.
OCEANS‘2014 in Taiwan

Nach Abschluss des Projekts stellte Dipl.-Ing. Romon Chakrabarti die Projektergebnisse im April 2014 auf der OCEANS‘2014 MTSIEEE in Taipei, Taiwan vor, siehe obige Bilder. Er referierte über die Wahl der pinguinförmigen Form der PreToS zur Erzielung eines minimalen Strömungswiderstands und beschrieb den Hauptantrieb mit den gegenläufigen Propellern sowie das Rudersystem mit der Kortdüse, woraus ein gutes Kurvenverhalten und eine hohe Beweglichkeit des Fahrzeugs resultiert. Bei der Vorstellung des Launch and Recovery Systems (LARS) hob er dessen Vorteile hervor, die sich insbesondere bei der Bergung eines AUVs ergeben. Die folgende Diskussion konzentrierte sich zunächst auf das LARS, wobei die Konferenzteilnehmer die Ansicht äußerten, dass es sich um einen aufwendigen Aufbau handle. Romon Chakrabarti stellte jedoch fest, dass der modulare Aufbau des Systems eine hohe Flexibilität sichere und auf vielen Forschungsschiffen einsetzbar sei. Zum Schluss verwiesen einige Zuhörer auf die inzwischen weltweite Adaption des druckneutralen Konzepts.
Das Konferenzdinner bildete das Highlight der OCEANS’14, indem die Teilnehmer zu Beginn mit einer Vorführung chinesischer Bräuche überrascht (siehe Bild unten) und anschließend mit einem opulenten Mahl verwöhnt wurden.

Bei einem Rundgang in Taipei trifft man überall Relikte des alten China (siehe nächstes Bild), die liebevoll gepflegt werden und das Einerlei der modernen Hochbauten erträglicher gestalten.

Allerdings sind die Taiwanesen auch sehr stolz darauf, große Leistungen in der Moderne zu vollbringen. Dazu gehören sowohl Spitzenleistungen in der Mikroelektronik als auch in der modernen Architektur. Ein Beispiel hierfür ist der Taipei Tower. Er gilt als eines der höchsten Gebäude der Welt, siehe Bild unten.

Oceanology International 2014 in London
Romon Chakrabarti, Johannes Gelze und Tino Schmidt nahmen im März 2014 an dem jährlich stattfindenden weltweiten Treffen von Marinetechnologen in London teil und diskutierten auf der zugehörigen Ausstellung mit Industrievertretern, Wissenschaftlern sowie Marineexperten über neue Entwicklungen in der Tiefseetechnik.

Dabei bekamen sie Gelegenheit, die Ergebnisse des PreToS Projekts darzustellen, wobei sich die Diskussionspartner für die druckneutrale Technik sowie die Erfahrungen bei der Umsetzung dieses Konzepts mit der Pegel und der PreToS interessierten. Weiterhin fragten Vertreter von Kongsberg Maritime, einem weltweit führenden Unternehmen der Marinetechnologie mit dem Hauptsitz in Norwegen, nach dem Aufbau und der Funktion des LARS.

Obwohl die Berliner an den Anblick von Doppeldecker-Bussen gewöhnt sind, faszinieren die Fahrzeuge in London aufgrund ihrer roten Farbe sowie ihrer bulligen Schnauze immer wieder.

Abschlussarbeiten der Projektmitarbeiter im Rahmen des PreToS-Projekts
Wesentliche Inhalte der geleisteten Forschungs- und Entwicklungsarbeiten finden sich in den daraus resultierenden sechs Dissertationen:
Eugen Olenew, Entwicklungen von Manövrier- und Steuereinrichtungen für ein druckneutrales Unterwasserfahrzeug
Oliver Preradović, Gestaltung eines autonomen Unterwasserfahrzeugs mit elektromagnetischer Auftauchvorrichtung und multifunktionalem Transportsystem
David Mischnick, Aussetz- und Bergevorrichtung für das autonome Unterwasserfahrzeug PreToS
Johannes Gelze, Entwicklung eines MEMS-basierten integrierten Navigationssystems für den Einsatz in einem druckneutralen tiefseetauglichen AUV
Tino Schmidt, Entwicklung und Aufbau eines aktiven Trimmsystems für autonome Unterwasserfahrzeuge
Romon Chakrabarti, Abhandlungen über den Nutzen, den Aufbau und den Betrieb autonomer Unterwasserfahrzeuge
Weiterhin entstanden im Verlauf des Projekts elf Diplomarbeiten, zehn Studienarbeiten, zwei Master- und sechs Bachelorarbeiten
Aus den Arbeiten des Forschungs- und Entwicklungsprojekts ergaben sich zwei wichtige Patente:
Mischnick, D., Preradović, O., Fandrich, M., Hartmann, R., Oginski, S., Olenew, E., Vorrichtung mit einer Aussetz- und Bergevorrichtung, deutsches Patent DE 10 2012 106 115.7F
Olenew, E., Wasserfahrzeug mit einer querstrahlantriebsbasierten Manövriereinrichtung, deutsches Patent, DE 10 2013 105 183.9
Die Fördergelder des Bundesministeriums für Wirtschaft und Technologie ermöglichten uns, fünf wissenschaftliche Mitarbeiter mit einer Vollzeitstelle über die gesamte Projektlaufzeit zu finanzieren. Weiterhin konnten wir dadurch die umfangreichen Sachmittel und die Forschungsreisen mit der PreToS bezahlen. Hierfür herzlichen Dank!
Resümée
Zunächst die Tabelle mit den wichtigsten Kenngrößen der PreToS:
| Kenndaten AUV PreToS | |
|---|---|
| Gewicht | 950 kg |
| Gewicht Nutzlast | 200 kg |
| Länge über alles | 4,45 m |
| Länge Nutzlastsektion | 0,7 m |
| Durchmesser | 960 mm |
| Marschgeschwindigkeit | 4 kn |
| Batterietyp | Lithium Polymer |
| Batteriekapazität | 16,85 kWh |
| Hauptantrieb | 3 kW |
| Einsatztiefe | bis 6.000 m |
Mit dem druckneutralen Aufbau der autonomen Unterwasserfahrzeuge Pegel und PreToS verfolgten wir einen völlig neuen Ansatz für die Konzeption und den Aufbau von Unterwasserfahrzeugen. Dabei diente die Pegel hinsichtlich der modularen und druckneutralen Gestaltung des Boots, des Skelettaufbaus, der Aufteilung der Auftriebselemente, der Gestaltung der Ruderanlage sowie der Querruder, des Hauptantriebs und der Lagetrimmeinrichtung als Testplattform, die uns bei vielen Tauchgängen in der Ostsee Hinweise lieferte, wie der Aufbau druckneutraler Unterwassersysteme für nahezu beliebige Tauchtiefen und dem Betrieb im Atlantik zukunftsfähig gestaltet werden kann.
Wir profitierten von diesen Vorarbeiten und modifizierten, verglichen mit der Pegel, bei dem Aufbau der PreToS einige technische Elemente. So galt es im Hinblick auf die geplanten längeren Tauchfahrten, die hydrodynamische Gestaltung des Boots energiesparend auszulegen und das Nutzlastsegment mit zusätzlichen Akkumulatoren sowie einer neu entwickelten, kostengünstigen bordeigenen Navigationseinrichtung auszurüsten. Weiterhin war der Hauptantrieb der PreToS mit zwei gegenläufigen Propellern ausgestattet. Dies steigert die Energieeffizienz des Antriebs, verhindert den Propeller-Drehmomenteffekt und mindert den Drall des abströmenden Wassers, welches die strömungsoptimierten Hauptruder infolge der Kortdüse verstärkt anströmt. Damit bleibt das Boot auch bei geringen Fahrgeschwindigkeiten manövrierfähig.

Die Akustik-Modems unseres Projektpartners, der Firma EvoLogics, dienten als Unterwasser-Kommunikationseinrichtung. Aufgrund ihrer überlegenen Modulationstechnik erreichten wir eine große Reichweite unter Wasser, so dass sich sämtliche Systeme gut überwachen ließen und die Steuerung des Boots gewährleistet war.
Bei der Erprobung der Pegel zeigte sich die Notwendigkeit einer Aussetz- und Bergevorrichtung, mit der man das U-Boot auch bei hohem Seegang sicher zu Wasser lassen und aufnehmen kann. Wir erarbeiteten daher parallel zur Entwicklung der PreToS ein Konzept mit dem Leitgedanken, die Bewegung des Mutterschiffs von der Aufnahmevorrichtung des U-Boots zu entkoppeln. Mit dem erfolgreichen Einsatz des LARS bei der letzten Atlantikfahrt demonstrierten wir, dass diese Grundidee die Voraussetzung bietet, auch bei größeren Windstärken Tauchgänge der PreToS zu ermöglichen. Infolge der Neuheit dieser Entwicklung meldeten wir das Konzept des LARS als Patent an.
Infolge der Konzentration der Auftriebselemente in einer Bootshälfte lag das Boot sehr stabil im Wasser. Reparaturen und Änderungen an technischen Bauteilen ließen sich wegen der leichten Zugänglichkeit und der offenen Bauweise an Bord eines Schiffs problemlos durchführen, was wesentlich durch die Helling und der drehbaren Lagerung des Boots unterstützt wurde.
Der Nachweis der Fahr-, Tauch- und Manövrierfähigkeit des druckneutralen Unterwasserfahrzeugs PreToS wurde anhand vieler Einsätze in der Ostsee und aufgrund der mangelnden Verfügbarkeit von Forschungsschiffen bei leider nur wenigen Atlantikfahrten erbracht, so dass wir zusammen mit den Projektpartnern einen großen Erfolg verbuchen konnten. Letztlich traten bei dem Aufbau und den Taucheinsätzen der Pegel und der PreToS die Vorteile des druckneutralen Aufbaus deutlich zutage. Der schlanke sowie flexible Aufbau bietet, verglichen mit konventionellen Systemen, eine erhöhte Ausfallsicherheit, wobei die Fertigungskosten und das Gesamtgewicht erheblich geringer ausfallen. Durch die offene Bauweise lassen sich einzelne Baugruppen einfach austauschen, so dass auch auf See die Ziele von Tauchmissionen leicht an neue Anforderungen adaptierbar sind.
Mein Team und ich arbeiteten mit Begeisterung an den aufregenden Meerestechnik-Projekten, da der druckneutrale Aufbau sowie der abenteuerliche Betrieb des Boots in der Ostsee und im Atlantik Anforderungen an alle ingenieurtechnischen Disziplinen stellte. Die vielfältigen Anforderungen an die Kreativität sowie die Leistungs- und Einsatzbereitschaft der Mitarbeiter schufen eine Corporate Identity, die ihren äußeren Ausdruck fand, indem die Mitglieder des Teams selbstbewusst T-Shirts mit dem PreToS-Emblem trugen, siehe Bild unten.


Damit endet der Bericht über unsere Abenteuer, welche wir erlebten, indem wir dem Beispiel der Natur folgten und mittels druckneutraler Technik zwei Tiefseefahrzeuge schufen, die wie die Lebewesen in der Tiefsee weder gasgefüllte Körper noch eine Druckhülle aufweisen. Ein typischer Vertreter dieser Art ist der Tintenfisch, ein Weichtier ohne Knochen, der bereits in der Antike bewundert wurde.