|
9 Medizinrobotik
Bis etwa 2010 konzentrierten sich die
medizintechnischen Arbeiten am FMT auf die Entwicklung neuer Endoskope
für die minimal-invasive Chirurgie: neue Videokameras in der
Endoskopspitze. Die Monitorbilder ermöglichen eine vorläufige
Diagnostik kranker Areale sowie auch die visuelle Kontrolle bei
Eingriffen. Hierbei ist eine gute Bildschärfe nötig, oft auch die
Vergrößerung eines bestimmten Bildausschnitts.
Dies war mit der bisher genutzten starren Optik nicht möglich, so dass
wir elektromagnetische Aktoren entwickelten, mit denen sich einzelne
optische Linsen oder auch Baugruppen schnell bewegen lassen, wodurch in
einem Regelkreis die Scharfeinstellung sowie auch die Vergrößerung des
Bilds gelingt (Autofokus). Parallel hierzu entwickelten wir neue
Beleuchtungstechniken, welche eine bessere Bildausleuchtung erlauben.
Bei einem minimal-invasiven Eingriff halten Assistenten das Endoskop.
Sie stehen nahe bei dem Operateur und ändern nach Anordnung des
Chirurgen die Endoskopstellung. Dies schränkt die Bewegungsfreiheit des
Arztes stark ein, so dass wir einen beweglichen Manipulatorarm zur
Endoskophalterung und -führung entwickelten, der an der Decke des
Operationsraums befestigt ist. Der Operateur steuert das damit frei
bewegliche Endoskop ohne Behinderung durch Eye-tracking oder auch
Sprachkontrolle.
Bei minimal-invasiven Multi-Port-Eingriffen kommen mindestens zwei
chirurgische Instrumente und ein Endoskop zum Einsatz. Der Chirurg
schafft mittels eines Trokars mit umhüllendem Tubus mehrere abdominale
Zugänge. Nach Entfernung des Trokars verbleiben die Tubi in der
Bauchdecke. Anschließend führt der Arzt durch die Tubi lange
Instrumentenschäfte, an deren Spitze sich Zangen, Scheren oder andere
Werkzeuge (Endeffektoren) befinden, in den Bauchraum ein. Durch Kippen
der Metallrohre um den Eintrittspunkt bewegt er je einen
Instrumentenschaft in der Tiefe des Abdominalraums (Triangulation).
Eine Minikamera, das Endoskop, ermöglicht dabei die Sichtkontrolle der
Aktionen. Mit absolut starren Instrumenten erzielt der Arzt im
Bauchraum jedoch wenig Bewegungsfreiheit. Eine Verbesserung lässt sich
beispielsweise durch Abknicken der Instrumentenspitze und deren
Rotation erreichen. Allerdings reichen bei der manuellen Betätigung
solcher Instrumente die Finger einer Hand sowie deren Kraft oft nicht
mehr aus, da an jedem Gelenk Reibung auftritt. Somit gestaltet sich die
übliche Instrumentenbedienung mit den Fingern äußerst schwierig und die
Finger verkrampfen.
Single-Port-Telemanipulator für die minimal-invasive Chirurgie
In Zusammenarbeit mit einem Berliner
Industriepartner planten wir daher die Entwicklung neuer OP-Hilfen, bei
denen Aktoren die Instrumente bewegen. Dies führt jedoch zu
unhandlichen und schweren Apparaturen, wodurch sich die Instrumente
nicht mehr manuell nutzen lassen. so dass die Idee zur Entwicklung
eines ferngesteuerten Manipulators reifte.
Telemanipulatoren erleichtern die chirurgische Tätigkeit. Der Arzt
sitzt an einer Eingabekonsole und steuert die Instrumentenbewegung bei
visueller Kontrolle des Operationsfelds. Marktführer ist der
Da-Vinci-Roboter, der jeweils einen starren Instrumentenarm betätigt
und den Arzt ersetzt, so dass bei Multi-Port-Eingriffen mehrere dieser
Systeme am OP-Tisch eingesetzt werden, was zu einem sperrigen Aufbau
führt und den direkten Kontakt zum Patienten erschwert. Schließlich
behindern auch hohe Beschaffungs- und Wartungskosten den
flächendeckenden Einsatz dieser Geräte.
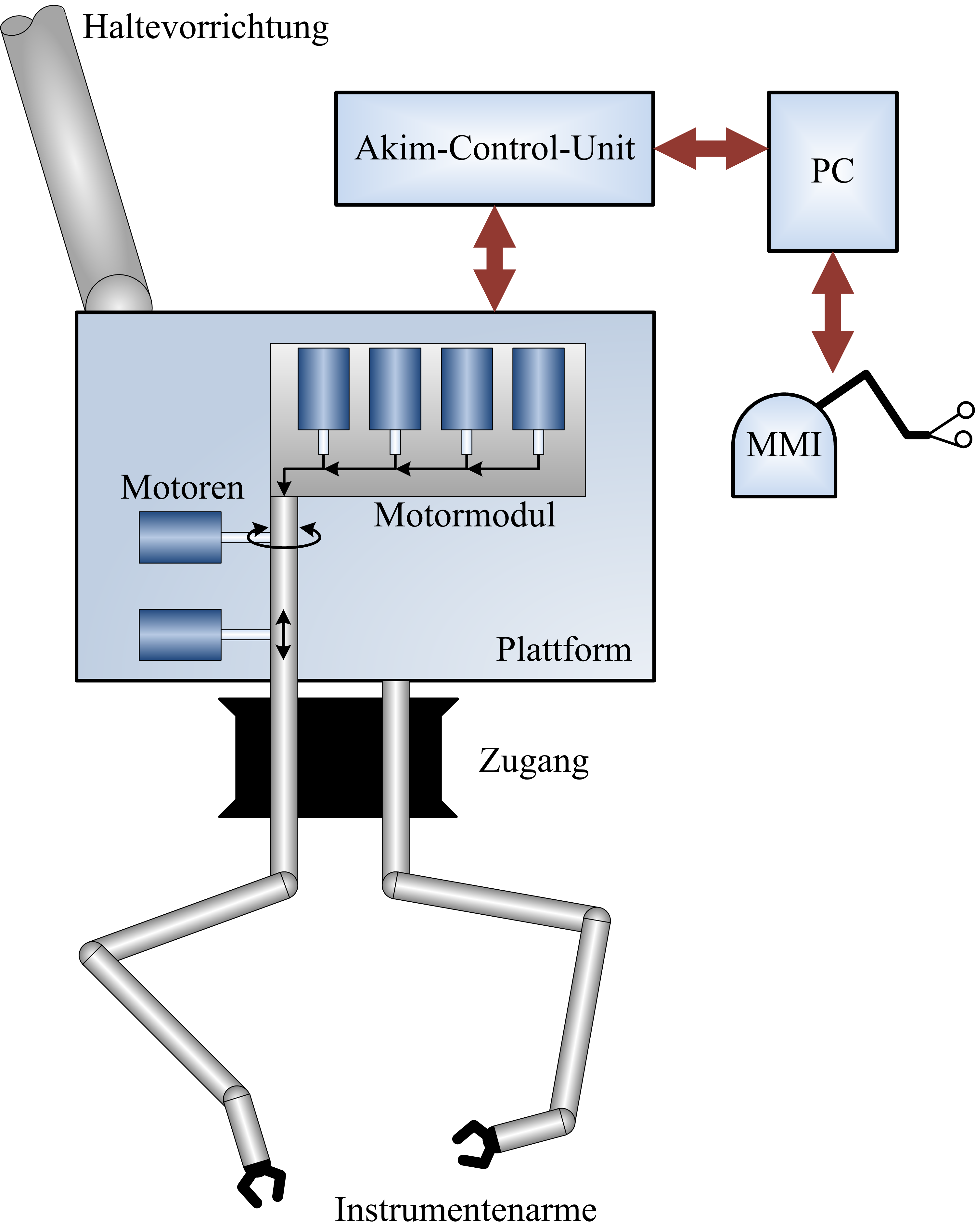
Schematischer Aufbau des Single-Port-Manipulators
Im Planungszeitraum geriet die bei
minimal-invasiven Eingriffen übliche Multi-Port-OP-Technik aufgrund der
vielfältigen Schnittverletzungen der Bauchdecke in die Kritik, Dagegen
lässt die Single-Port-OP-Technik nur einen Schnitt zu, um die Anzahl
der Läsionen und späteren Narben zu minimieren. Die Instrumente werden
durch diesen engen Zugang in den Bauchraum eingeführt und entfalten
sich dort für den chirurgischen Eingriff. Starre Schäfte sind hierbei
nicht sinnvoll, da wegen des Einzelzugangs keine Triangulation möglich
ist. Versieht man dagegen die Rohre in der Weise mit beweglichen
Gelenken, dass sie sich wie menschliche Arme im Bauchraum bewegen, so
kann der Arzt die Instrumente wie bei offenen OPs in gewohnter Weise
intuitiv benutzen (siehe schematische Funktionsübersicht oben).
Zur Entwicklung eines völlig neuen telemanipulativen
Single-Port-Systems für minimal-invasive Eingriffe reichten wir daher
mit einer Berliner Medizintechnikfirma bei der Investitionsbank Berlin
(IBB) einen Projektvorschlag ein, der als EFRE-Förderprojekt „Aktive
chirurgische Instrumente für minimal-invasive Eingriffe“, Kurzform
AKIM, genehmigt wurde.
In zwei Jahren Entwicklungsarbeit entstand ein voll funktionsfähiger
Single-Port-Telemanipulator, dessen zwei Instrumentenarmen sich von
einer Konsole als Mensch-Maschine-Schnittstelle (MMI) bedienen lassen.
Dabei steuert der Arzt mit zwei Steuerknüppeln die Position und Winkel
der Endeffektoren an der Spitze der Arme. Da hierzu die Bewegung
mehrerer Armgelenke erforderlich ist, berechnet die AKIM-Control-Unit
die Stellwinkel der Elektromotoren für die Armgelenke.
Wegen des kleinen Durchmessers der Instrumentenarme ist es jedoch nicht
möglich, ausreichend kräftige Motoren zur Bewegung der Gelenke und der
Instrumente in die Arme einzufügen, so dass sie sich außerhalb des
menschlichen Körpers in einer Plattform befinden. Daher gelangt die
Bewegungsenergie für die Betätigung der Armgelenke und der Instrumente
mit flexiblen Wellen an die Wirkstellen.
Das Bild unten zeigt den Laboraufbau des am FMT entwickelten
Single-Port-Telemanipulators, bei dessen OP-Einsatz zwei frei
bewegliche Gelenkarme in gestrecktem Zustand durch einen Tubus in den
Bauchraum des Patienten einführt werden. Der OP-Roboter lässt sich ohne
Kraftaufwand an der Benutzerkonsole bedienen und beispielsweise an dem
oben erwähnten Manipulatorarm befestigen, wobei ihn der Arzt direkt am
Patienten einsetzt oder ihn sitzend an der Konsole steuert.
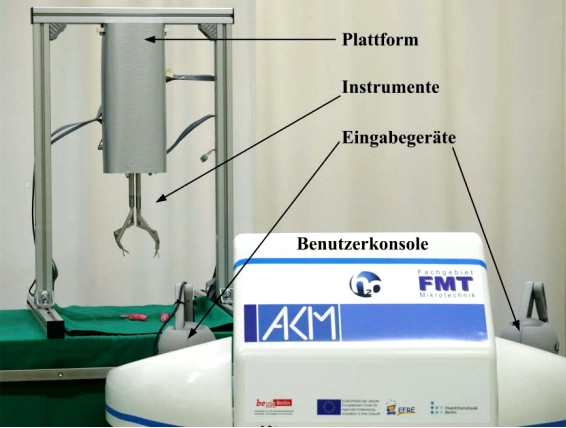
Laboraufbau des Single-Port-Telemanipulator-Systems
links: Motorplattform und Gelenkarme
rechts: Benutzerkonsole mit zwei Handgriffen zur Steuerung der
Gelenkarme
Die Arme des Manipulators sind durch Gelenke
in einzelne Segmente aufgeteilt. An deren Spitze befinden sich
auswechselbare Werkzeuge (Effektoren) zum wahlweisen Greifen, Schneiden
oder Koagulieren des Gewebes. Die Gelenkarme führen wie menschliche
Arme Knickbewegungen aus, so dass sich der Arbeitsablauf für den
Operateur wie bei einem offenen Eingriff gestaltet. Die Motoren mit den
Getrieben und der Ansteuerelektronik (in der Plattform, Bild unten)
bilden eine mechatronische Antriebseinheit, welche die vom Operateur an
der Eingabekonsole erzeugten Signale in konkrete Aktionen der Arme und
Endeffektoren umsetzt. Beide Arme lassen sich unabhängig voneinander
heben und senken, um ihre eigene Achse drehen sowie abknicken.
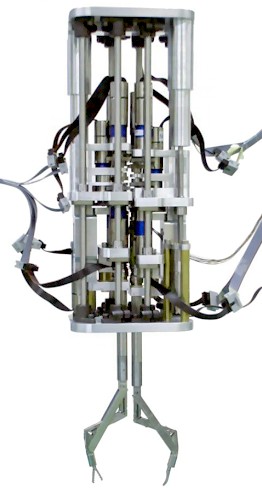
Innenansicht der Motorplattform mit den Getriebemotoren
zur Bewegung der einzelnen Freiheitsgrade
Durch die Hohlsegmente der Arme verlaufen,
ausgehend von der Plattform, flexible Drehwellen, welche die
Knickbewegungen der Armsegmente sowie die Manipulationen der
Endeffektoren aktuieren. Dank eines innovativen Optimierungsalgorithmus
zur Auslegung der Armsegmente erreicht der Arzt mit der Einheit einen
bei Single-Port-Systemen weltweit unerreicht großen Bewegungsbereich.

Betrieb des AKIM-Systems,
der Wandmonitor zeigt die Greiferenden der beiden Gelenkarme
Das große Leistungsspektrum des äußerst
kompakten Single-Port-Systems wird durch eine Reihe von optischen
Kollisions- und elektromagnetischen Positionssensoren zur
Sicherheitsüberwachung der Aktionen im menschlichen Körper ergänzt.
Insgesamt gelang es uns bei der Entwicklung und dem Aufbau des
Telemanipulators viele Ideen durch Patente zu schützen.
Medizinroboterteam mit dem AKIM-System
Multi-Port-Telemanipulator
Klinische Studien kamen während der
Beantragung von AKIM zu dem Schluss, dass durch den Singleport-Zugang
weniger Traumata entstehen und ein besseres ästhetisches Ergebnis
resultiert, da die Narbe im Bauchnabel praktisch unsichtbar ist.
Allerdings änderte sich während der Entwicklung von AKIM die Meinung:
bezüglich der Wundheilung sah man keinen Vorteil, da der Durchmesser
des Single-Ports viel größer ist als der eines Standard-Trokars.
Weiterhin zeigte es sich, dass man minimal-invasive Multi-Port-OPs
schneller, einfacher und kostengünstiger durchführen kann.
Die Chirurgen forderten ein System, welches dem vorher gewählten Ansatz
zur Motorisierung der Arme entspricht, aber Multi-Port-tauglich und
sehr klein sein sollte. Dadurch lassen sich die Arme flexibler
platzieren. In Kooperation mit unserem Berliner Industriepartner
beantragten wir das EFRE-Förderprojekt „Aktive Multiport-Instrumente für minimal-invasive Eingriffe“, Kurzform AMIE, das ebenfalls durch die IBB unterstützt wurde.
Bei minimal-invasiven Multi-Port-Eingriffen kommen mindestens zwei
chirurgische Instrumente und ein Endoskop zum Einsatz. Der Chirurg
schafft mittels eines Trokars mehrere abdominale Zugänge, wobei nach
Entfernung des Trokars mehrere Tuben in der Bauchdecke verbleiben.
Anschließend führt der Arzt durch die Tuben lange dünne Metallrohre, an
deren Spitze sich Zangen, Scheren oder andere Werkzeuge befinden, in
den Bauchraum ein. Durch Kippen der Metallrohre um den Eintrittspunkt
bewegt er je einen Instrumentenschaft in der Tiefe des Abdominalraums.
Jeder Schaft mit Instrument wird von einem Telemanipulator bewegt.
Dabei ersetzen die robotischen Manipulatoren den Arzt direkt am
Patienten. Eine Minikamera, das Endoskop, ermöglicht die Sichtkontrolle
der Aktionen.
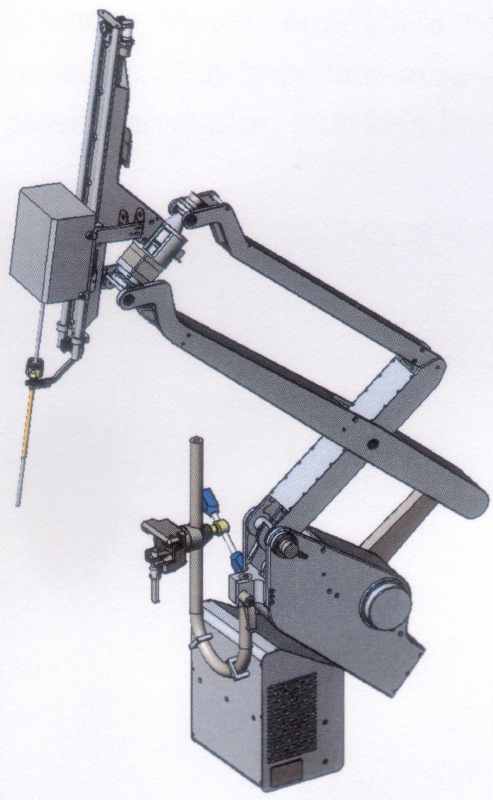
Die beiden Bilder unten zeigen schematische Ansichten des vom
AMIE-Projektteam entwickelten Telemanipulators, der aus zwei
wesentlichen Funktionseinheiten besteht: der Positionier- und
Schwenkeinheit, einem Scherengetriebe, das an einem Ende des OP-Tischs
befestigt wird sowie aus der zweiten Funktionseinheit am oberen Ende,
dem Instrumentenmodul, dessen Instrumentenschaft sich durch Auslegen
des Scherengetriebes über einem Trokar positionieren und in das Abdomen
einführen lässt.
 |
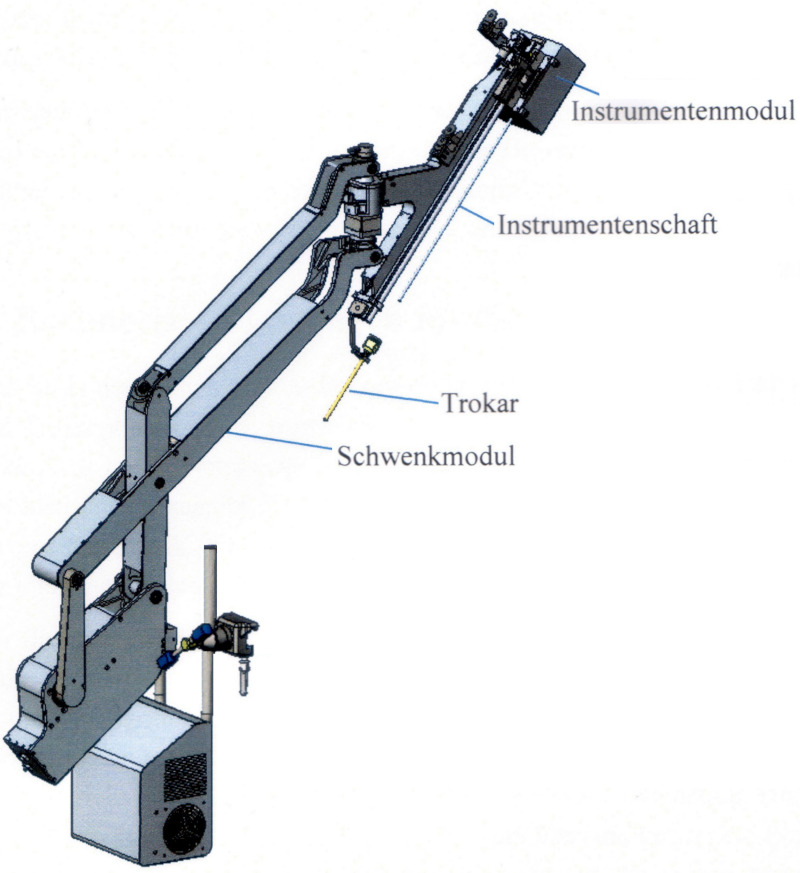 |
Schematische Ansichten des AMIE-Telemanipulators
Um einen größeren Raumbereich zu erreichen,
beschreibt der Schaft mit einem Endeffektor an der Spitze durch die
Kombination von Kipp- und Schwenkbewegungen Kegelfiguren im Raum, deren
Spitze sich am Trokarpunkt befindet (Bild unten). Will man bei
chirurgischen Eingriffen eine mit konventionellen Operationen
vergleichbare Fertigkeit erreichen, muss der Endeffektor Dreh- und
Knickbewegungen ausführen, damit beispielsweise das Greifen oder
Schneiden von Gewebe mit der richtigen Instrumentenstellung erfolgt.
Die Ansteuerung des AMIE-Manipulators erfolgt mit der gleichen
Eingabekonsole wie bei dem AKIM-Projekt. Der Steuerknüppel wurde
zusätzlich mit einem Schließgriff versehen, um die Schneid- und
Greifbewegungen des Endeffektors zu initiieren. Durch Rückmeldung der
Greif- oder Schneidekraft an den Aktuator dieses Griffs erhält der Arzt
haptische Signale, die ihm Aufschluss über den Widerstand des Gewebes
vermitteln.
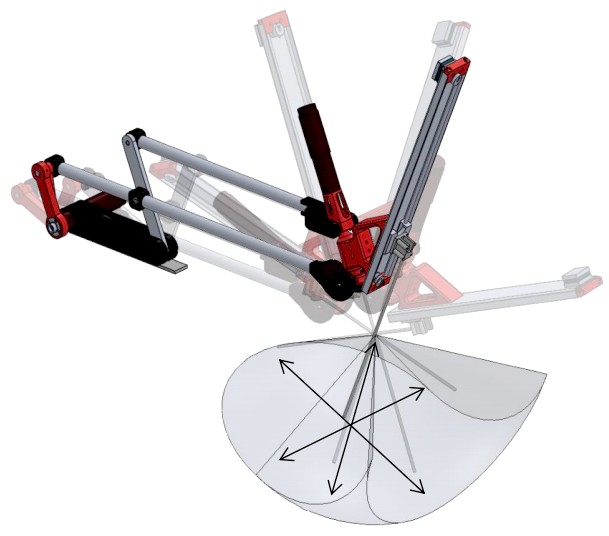
Agitationsraum des Schafts bei Kipp- und Schwenkbewegungen des Manipulators
Aufgrund der kurzen Bewilligungsdauer des
Vorhabens von nur 18 Monaten vereinbarten die beiden Projektteams eine
eigenverantwortliche Entwicklung der jeweiligen Funktionseinheiten. Die
Firmenmitarbeiter konzentrierten sich auf das Schwenkmodul, während das
FMT-Team das Instrumentenmodul sowie bewegliche Endeffektoren
entwickelte. Bei der Auslegung des Gesamtsystems sowie dem Aufbau der
Ansteuerelektronik und -software arbeiteten beide Gruppen eng zusammen.
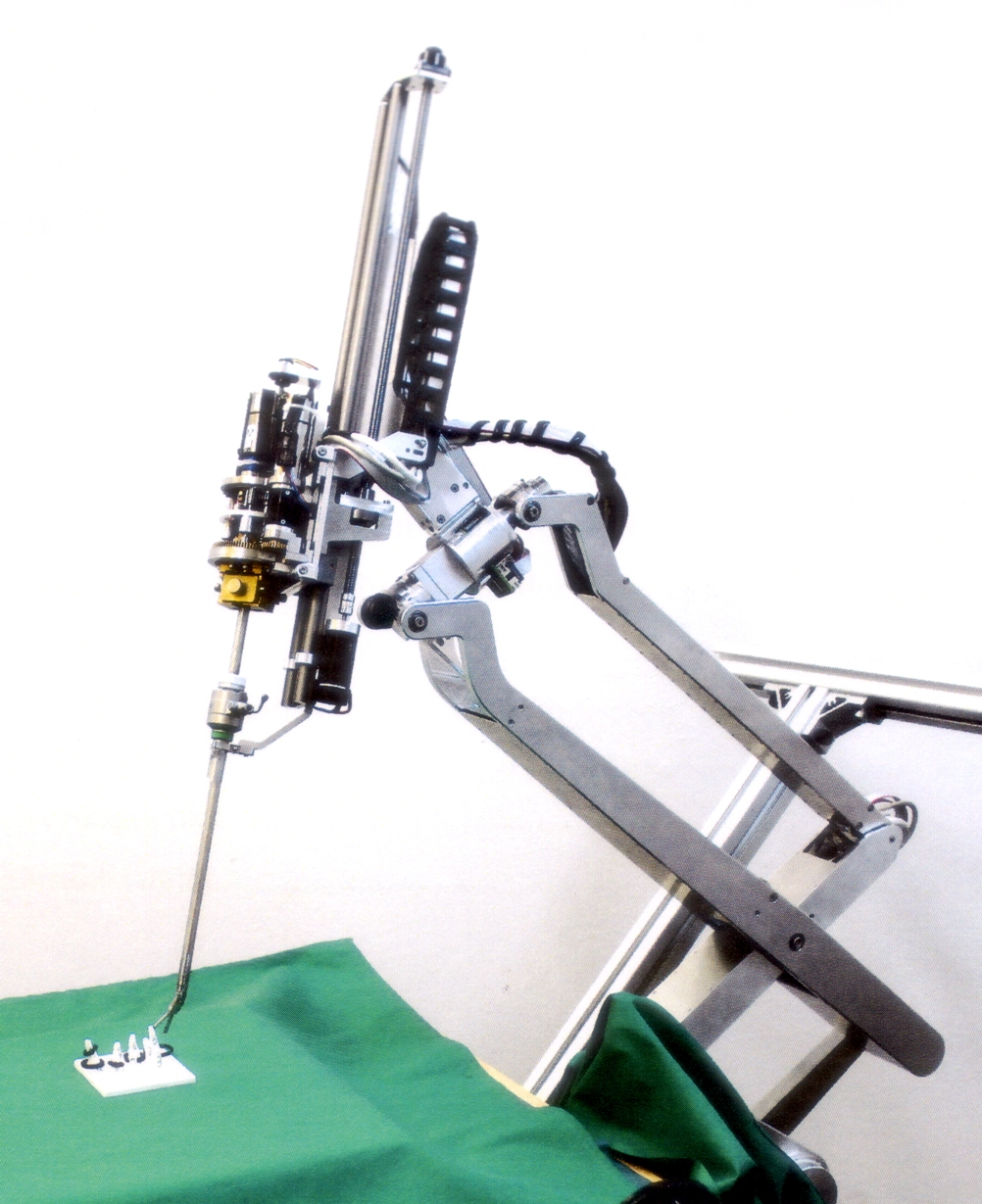
Laboraufbau des Telemanipulators, Geschicklichkeitsübungen
Der Laboraufbau des Telemanipulators (Bild
oben) bewährte sich bei den Untersuchungen im Drylab des FMT. Eine
Reihe von Testpersonen absolvierte mehrere Geschicklichkeitsparcours.
Dazu zählten Einfädelübungen von Drähten in Ringen, die montagegerechte
Aufnahme einzelner Bauteile und deren Aufbau zu komplexeren Gebilden
sowie weitere Manipulationsübungen. Die Probanden bedienten den
Steuerknüppel an der Konsole nach wenigen Versuchen problemlos und
intuitiv, wobei sich infolge der hohen Dynamik des Systems sowie der
sehr exakten Führung der Endeffektoren auch feinste Sortier-, Einfüge-
und Platziermanipulationen höchst präzise durchführen ließen.
Insgesamt ist festzuhalten, dass es durch diese Forschungsarbeiten
gelang, einen Telemanipulator zu entwickeln, der Schwachpunkte bereits
existierender Systeme durch neue Gestaltungsansätze überwindet. Somit
liefert dieser neu entwickelte Telemanipulator die Basis für
kostengünstige und intelligente Robotiksysteme der minimal-invasiven
Chirurgie.

Dr.-Ing. Simon Albrecht demonstriert nach seiner wissenschaftlichen Aussprache
sämtliche Funktionen des Telemanipulators
|
|
|