10 B Abenteuer Tiefseetechnik, das Unterwasserfahrzeug PreToS
II Testfahrten in der Ostsee, Komponentenerprobung im Atlantik
Erste Probefahrten der PreToS im Hafen von Rostock, September 2011
Die Jungfernfahrt der PreToS fand im Hafenbecken von Rostock im September 2011 statt. Dabei zeigte das Boot bei Wendemanövern und Überwasserfahrten eine große Beweglichkeit sowie ein ausgezeichnetes Fahrverhalten und ließ sich über Funk sehr gut steuern. Die Bildfolge unten dokumentiert die Ankunft des Boots am Hafen, das Aufnehmen mit einem Kran sowie die Wasserung und die mit einem Seil gesicherte erste Fahrt unter Einsatz des Hauptantriebs. Schwäne beobachten interessiert das Geschehen.


Aufnahme des Boots mit einem Kran (rechts)




Ostseefahrt mit dem Forschungsschiff Elisabeth Mann Borgese, September 2011
Im Anschluss an die Testfahrten im Hafen von Rostock wurde das Boot auf das Forschungsschiff Elisabeth Mann Borgese gebracht, welches in der Ostsee an der Darßer Schwelle sowie im Arkonabecken als Basis für Fahr- und Tauchversuche des AUVs diente. Nach der Überprüfung einzelner Einbaukomponenten durch Dipl.-Ings. Oliver Preradović und David Mischnick (im Bild unten) erfolgte die Taufe des Boots auf den Namen PreToS (Pressure Tolerant Systems), siehe Bild weiter unten. Infolge der offiziellen Namensgebung durfte das Fahrzeug in der Folge mit dem Eigennamen beschriftet werden.


Für die Testfahrten wurde das Boot mit dem Bordkran an einem Haken aufgenommen und von der Helling gehoben, anschließend über die Bordwand geschwenkt und schließlich ins Wasser abgesetzt, siehe Bildfolge unten. Zur Bergung des AUVs war es erforderlich, den Lasthaken am schwimmenden Boot in die Transportöse einzuhaken. Hierzu wurde meist ein weiteres, kleines Fahrzeug ausgesetzt, da man von dort den Haken per Hand anbringen konnte. Dieser Vorgang lässt sich jedoch nur bei ruhiger See durchführen.

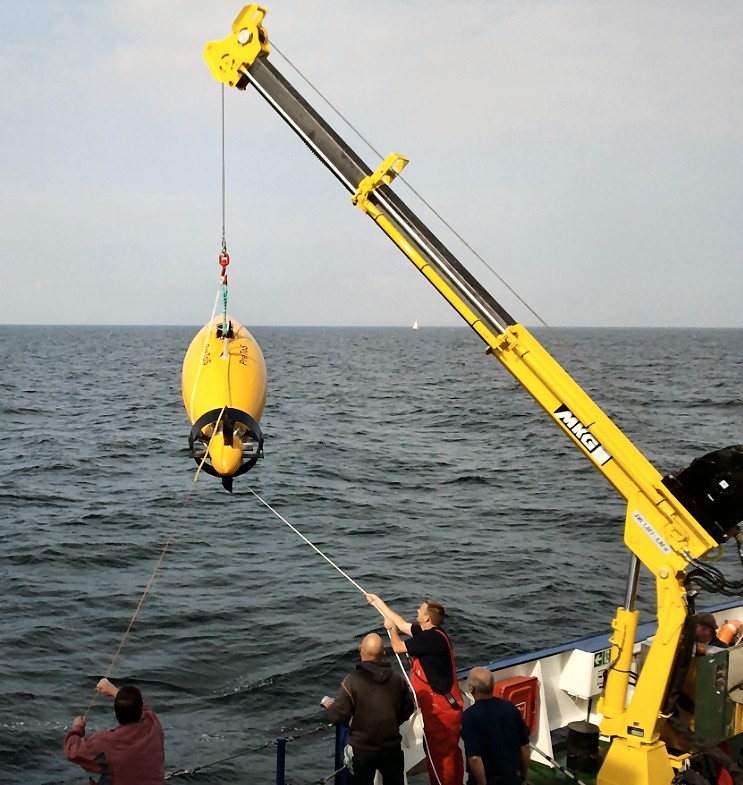

Absetzen im Wasser (rechts)
an Bord des Foschungsschiffs zurück
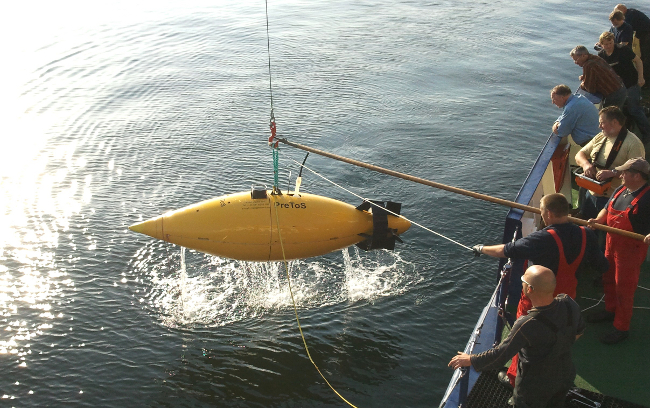
Allerdings zeigte es sich, dass die beschriebenen Prozeduren zur Aussetzung und Wiederaufnahme des Boots zu kritischen Situationen führen können. Dazu gehören die Pendelbewegungen des Boots am Seil infolge der Schwankungen des Forschungsschiffs sowie die infolge des Wellengangs unkontrollierten Bewegungen der PreToS nach der Aussetzung und der Wiederaufnahme auf dem Wasser. Je nach den Strömungsverhältnissen wird das Fahrzeug an die Bordwand gedrückt. Die folgenden Bilder beschreiben solche Situationen, bei denen Seile und Stangen für die Hilfsmanöver zur Abwehr genutzt werden.


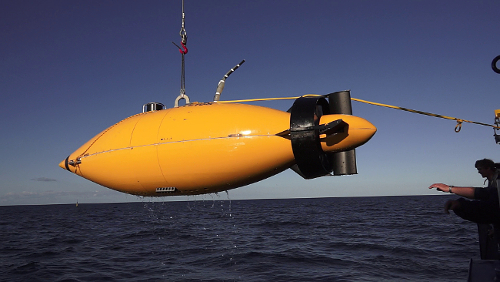
Bei bewegter See kam es zu einer Havarie und es entstand ein Schaden am Bug, siehe Bild unten links. Um jedoch die Testfahrten weiterzuführen, wurde die Bugverkleidung beseitigt und behelfsmäßig eine Boje zur Schadensbehebung eingesetzt, vgl. Bild unten rechts.


In der Folge gewann die Schiffsmannschaft eine gewisse Erfahrung bei der Aussetzung und Wiederaufnahme des Boots. Es gelang, weitere Beschädigungen zu vermeiden, so dass der Testbetrieb zur Untersuchung der Manövrierfähigkeit und Steuerbarkeit des Boots fortgesetzt wurde, um Parametereinstellungen für die Kursregelung, beispielsweise bei Kreis- und Viereckfahrten, zu gewinnen. Die Taucheinrichtungen standen zu diesem Zeitpunkt noch nicht zur Verfügung. Jedoch ließen sich mit Hilfe des Tiefenruders Tauchgänge bis zu einer Tiefe von fünfzig Meter zur Einstellung des Tiefenreglers durchführen und Erfahrungen beim Betrieb der Unterwasserkommunikation und dem akustischen Modem sammeln.
Als Fazit der Probefahrten lässt sich festhalten, dass die PreToS bei Über- und Unterwasserfahrten ein ausgezeichnetes Fahrverhalten sowie eine sehr gute Manövrierfähigkeit aufwies. Allerdings wurde deutlich, dass für den Einsatz auf dem Atlantik eine Aussetz- und Bergeeinrichtung benötigt wird, welche auch bei hohem Wellengang die sichere Wasserung und Wiederaufnahme des Boots gewährleistet. Da diese Erkenntnis schon beim praktischen Umgang mit der Pegel reifte, sah unsere Projektplanung die Entwicklung einer geeigneten Vorrichtung vor, so dass parallel zu den Aufbauarbeiten an der PreToS diese Aufgabe von einer Arbeitsgruppe am Fachgebiet Mikrotechnik bearbeitet wurde.
Exploration des Auftriebstrimmsystems, Forschungsschiff Alkor, März 2012
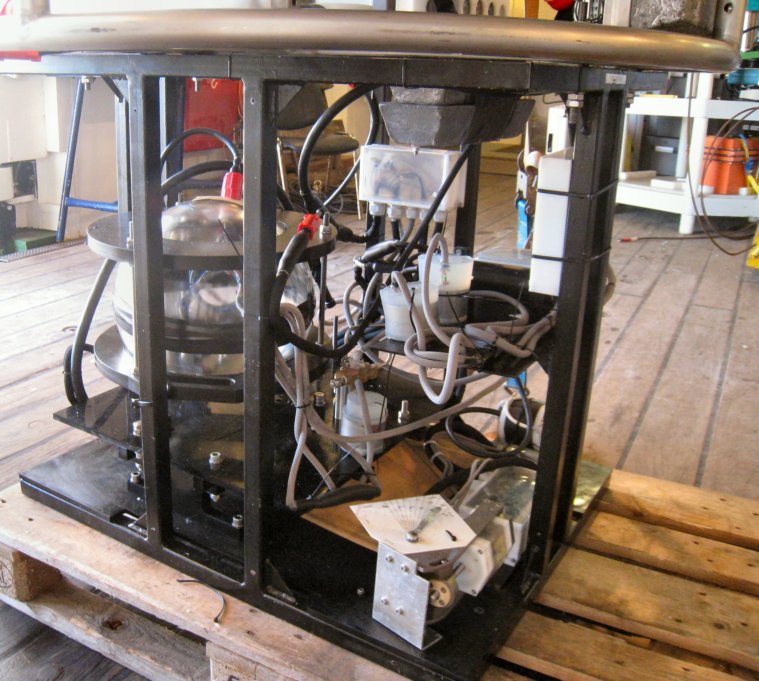
Bei den Unterwasserfahrten der PreToS ist der zuverlässige Betrieb der Taucheinrichtungen von größter Bedeutung, da Fehlfunktionen der technischen Komponenten oder Leckagen zum Sinken und Verlust des Boots führen können. Tino Schmidt nahm daher im März 2012 die Gelegenheit wahr, eine Arbeitsgruppe der Firma Evologics bei ihrer Ostseefahrt auf dem Forschungsschiff Alkor zu begleiten. Deren Ziel war der praktische Einsatz von Access Points zur Erprobung der Unterwasserkommunikation. Parallel dazu testete Tino Schmidt eine Taucheinrichtung, die er als Versuchsaufbau in ein Trägergestell montierte (siehe Bild unten), welches mit einem Kran in eine Tiefe von etwa vier Meter in das Wasser versenkt wurde, wobei sich am Seil noch Kabel zur Energieversorgung und zur Steuerung des Systems befanden, so dass die Kontrolle vom Schiff aus erfolgte. Der Funktionstest verlief bei Wassertemperaturen von etwa zwei Grad, was den Verhältnissen im Atlantik entspricht, recht erfolgreich.
Atlantikfahrt mit dem Forschungsschiff Poseidon, Mai 2012
Das Forschungsschiff Poseidon des GEOMAR-Zentrums für Meeresforschung Kiel unternahm von April bis Mai 2012 eine Atlantikfahrt, welche sowohl nach Lissabon als auch auf die Azoren führte, um auf See experimentelle Untersuchungen durch mehrere Forschungsteams durchzuführen. Hierzu zählten auch Teilnehmer unseres Projekts: Mitarbeiter von Evologics testeten Access Points und deren Kommunikation in der Tiefsee, ENITECH erprobte ein kleines Unterwasserfahrzeug (ROV, remotely operated vehicle), welches über ein Kabel gesteuert und mit Energie versorgt wird, während dessen Tino Schmidt und Carl Thiede die Gelegenheit nutzten, das Auftriebstrimmsystem, einen druckneutralen PC und eine Unterwasserkamera unter Tiefseebedingungen zu betreiben.
Im Bild unten bereitet Tino Schmidt das Auftriebstrimmsystem für den Tiefseeeinsatz vor, er wird von Carl Thiede bei der Befestigung des Tauchsystems am Geräteträger unterstützt, siehe Bild weiter unten.


Zur Absenkung in die Tiefsee steht eine Trägereinheit zur Verfügung, an der die Taucheinrichtung montiert wird, siehe Bild unten. Auf der Trägereinheit befinden sich Akkumulatoren zur Energieversorgung, eine Kommunikationseinrichtung sowie eine Winde mit einem Kabel. Ein Einleiterkabel versorgt das Trägersystem mit elektrischer Energie und ermöglicht die Verbindung mit dem Forschungsschiff Poseidon zur Steuerung der Geräte.
Insgesamt erbrachten die experimentellen Untersuchungen den Nachweis, dass die getesteten Geräte den rauen Bedingungen des Atlantiks standhalten.
