10 B Abenteuer Tiefseetechnik, das Unterwasserfahrzeug PreToS
III Entwicklung der Aussetz- und Bergevorrichtung
Vorüberlegungen
Die Erfahrungen beim Aussetzen und Bergen der AUVs Pegel und PreToS mit Kran und Seil zeigten bereits früh die Notwendigkeit, geeignete Vorrichtungen zu entwickeln, welche die Gefahr einer Beschädigung oder gar den Verlust des Boots, insbesondere bei hohem Seegang, verhindern. Daher beschäftigte sich eine Arbeitsgruppe des FMT schon zu Beginn des Projekts mit dieser Aufgabe und konzipierte eine Reihe von Strategien, wobei wir zunächst den aus der Literatur bekannten Stand der Technik prüften.
Bei der Wasserung mit Hilfe von Kran und Seil besteht zwischen dem Schiff und dem Boot eine durch die Schwerkraft vorgegeben Verbindung, so dass sich das Boot am Seil entsprechend dem Heben und Senken des Mutterschiffs bewegt. Nähert sich das AUV der Wasseroberfläche, schlagen die Wellenberge von unten an das Boot, wobei das Seil kurzzeitig entlastet und bei dem nächsten Wellental wieder gestrafft wird. Zusätzlich überlagert sich noch die Pendelbewegung des Boots am Seil. Dies sind unkontrollierbare Prozesse, die sich in ähnlicher Weise bei der Bergung des Boots wiederholen. Als potenzielle Unfallgefahren lassen sich ein Seilriss, bei starkem Wellengang die Beschädigung der Bootsunterseite oder auch das Anschlagen des Fahrzeugs an den Rumpf des Mutterschiffs identifizieren.
Eine Aussetz- und Bergevorrichtung (Launch And Recovery System, LARS) muss daher die niederfrequente Bewegung des Mutterschiffs von dem höher frequenten Wellengang entkoppeln. Tatsächlich ergab die Analyse des Stands der Technik, dass keine der vorgeschlagenen Methoden dieser Aufgabe gerecht wird. Wir mussten daher einen eigenen Weg suchen.
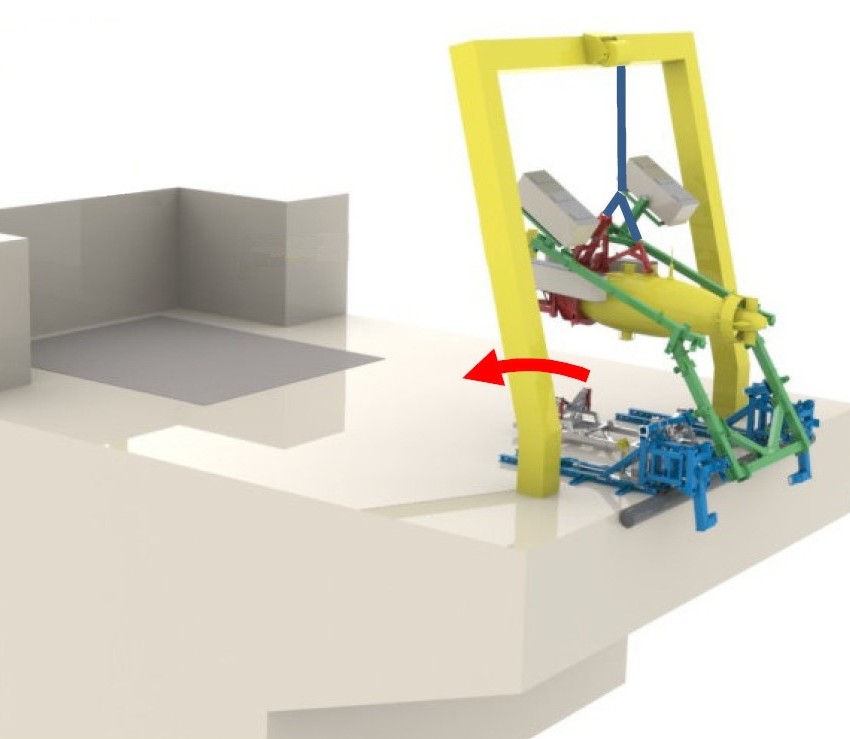
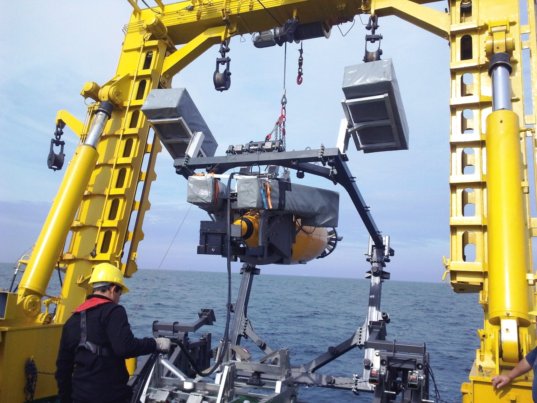
Dabei reifte die Idee einer separaten schwimmfähigen Fahrzeugaufnahme, welche die PreToS aussetzen und aufnehmen kann. Für den Aussetzprozess wird der Verbund aus Bergeeinrichtung und Boot vom Mutterschiff auf die Wasseroberfläche gesenkt. Bei der Bergung der PreToS fährt das Fahrzeug in die Bootsaufnahme, welche gemeinsam mit der PreToS auf das Mutterschiff gehievt wird. Hierzu ist ein Schiffskran erforderlich. Zu beachten ist allerdings, dass die Testfahrten der PreToS mit verschiedenen Schiffen stattfinden. Hierbei kommen die Forschungsschiffe Alkor, Elisabeth Mann Borgese, Poseidon, Maria S. Merian und Polarstern in Frage. Allen ist gemeinsam, dass sie zusätzlich zu Lastkränen über einen sogenannten A-Rahmen oder A-Kran am Schiffsheck verfügen, welcher sich schwenken lässt. Das Bild unten links zeigt beispielhaft den Heckbereich der Elisabeth Mann Borgese, wobei ein roter Pfeil die Kippbewegung des A-Krans andeutet. Dabei wird auch deutlich, dass im Heckbereich ausreichend Platz zur Lagerung der PreToS und des Equipments zur Verfügung steht.


Schwenkarm-System (rechts), Erläuterungen siehe Text
Das von uns entwickelte Schwenkarm-System nutzt den kippbaren A-Kran und dessen Lastrolle zur Absenkung oder Anhebung der schwimmfähigen Bootsaufnahme, die zwischen zwei Armen drehbar aufgehängt ist, siehe Bild oben rechts. Das obere Armelement ist am Heck drehend gelagert und wiederum schwenkbar mit dem unteren Armelement verbunden. Da die Bootsaufnahme schwimmfähig ist, folgt sie dem Wellengang und ist wegen der drehbaren Arme weitgehend von der Bewegung des Versorgungsschiffs entkoppelt.
Die konstruktive Auslegung des Gesamtsystems basiert wesentlich auf den Arbeiten von Dipl.-Ing. Stefan Oginski. Er untersuchte anhand von FE-Analysen und Festigkeitsberechnungen sowie auch kinematischen Überlegungen verschiedene Ansätze zur Auslegung des gesamten Aufbaus und optimierte schließlich den finalen Entwurf, so dass wir die Fertigung der Einzelteile aufgrund seiner Arbeiten bei einer externen Firma in Auftrag gaben.
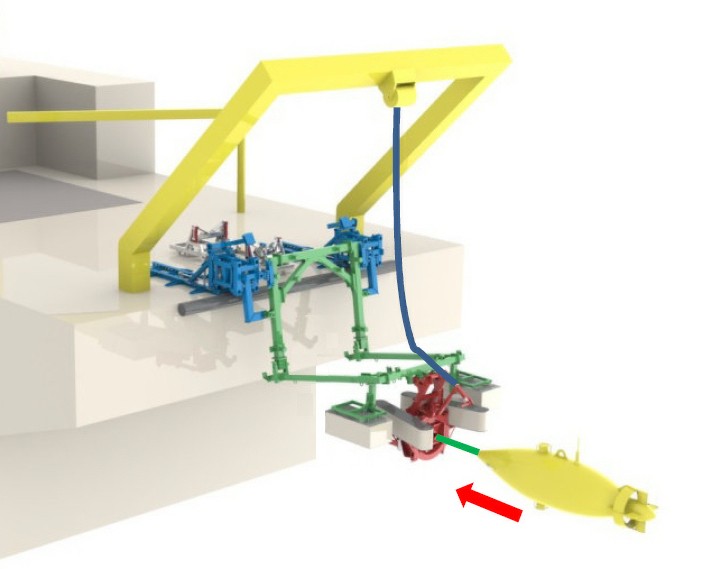
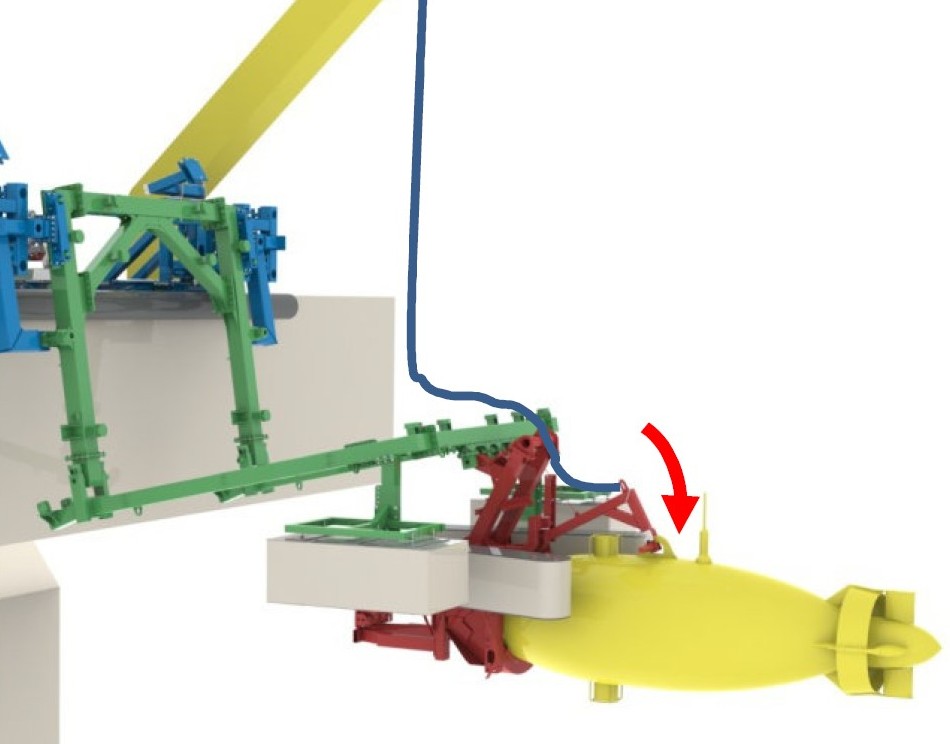
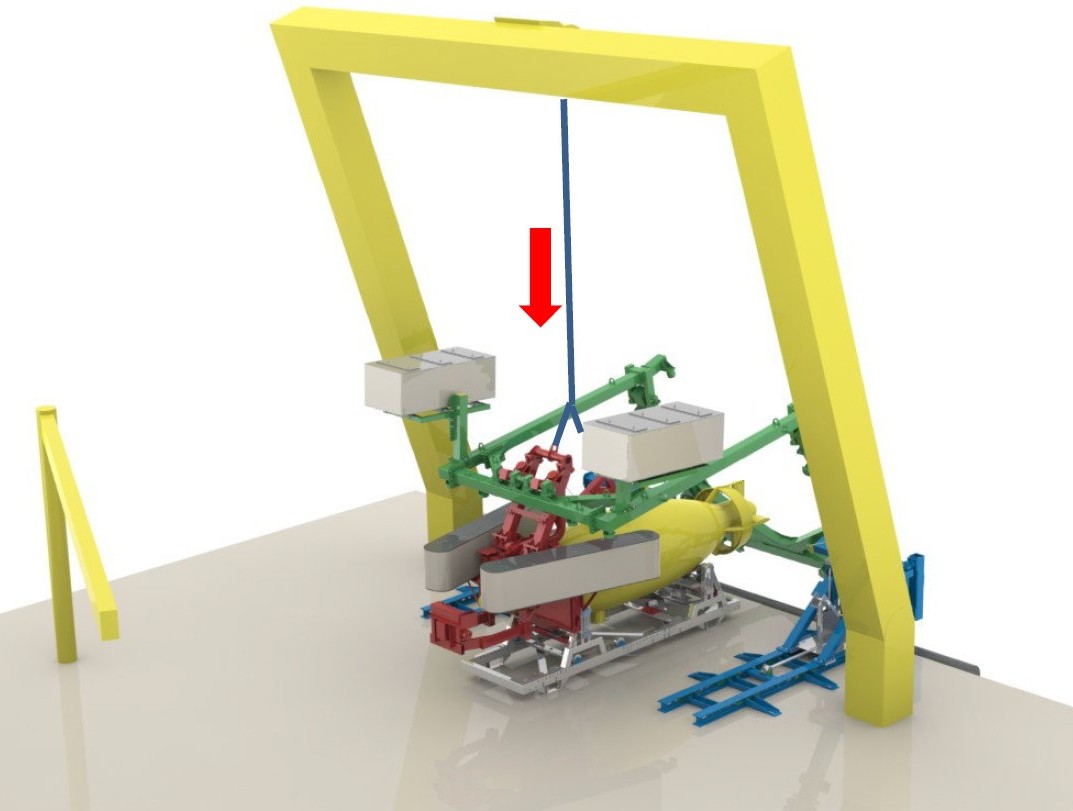
Bei dem Bergevorgang stößt die PreToS zunächst einen Schwimmkörper an einem Seil aus, das nach dem Einfangen des Schwimmkörpers mit der Seilwinde der Bergevorrichtung (Bergekäfig) verbunden wird. Das Schiff nimmt leichte Fahrt auf und richtet dadurch die PreToS im Schlepp kollinear aus. Die weitere Abfolge des Bergeprozesses ist schematisch auf den folgenden Bildern dargestellt. Nach der Wasserung des Bergekäfigs zieht dessen Seilwinde das Boot in den Käfig und arretiert es mit einem Klappbügel. Es folgt die Anhebung des Schwenkarms mit der Seilrolle des A-Krans, wodurch der Verbund aus Bergevorrichtung und PreToS das Wasser verlässt. Die anschließende Schwenkung des A-Krans positioniert den Verbund über der Helling und setzt das Boot anhand der Seilrolle des A-Rahmens auf der Helling ab. Durch die Lösung des Bügels am Käfig lässt sich dieser mit einem Kran abnehmen und seitlich auf Deck ablegen.
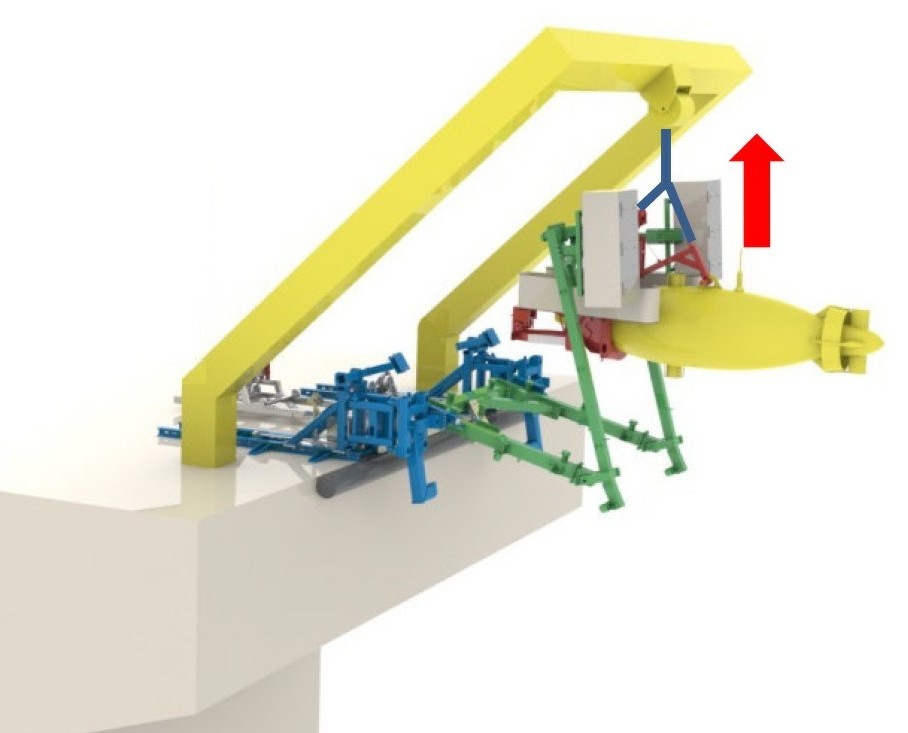
Hieven des Verbunds mit der Seilrolle des A-Krans (rechts)
Erprobung des Bergekäfigs auf der Ostsee, August 2012
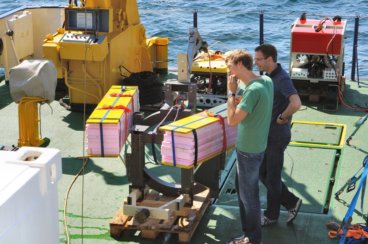
Im August 2012 sammelten wir bei einer Ostseefahrt mit der Elisabeth Mann Borgese erste Erfahrungen mit dem Aussetzen und Schleppen des Bergekäfigs. Im Bild unten links ist die kreisförmige Öffnung des Bergekäfigs zu erkennen, in die das Boot mit einer Seilwinde hineingezogen und durch das Schließen des Rasthakens fixiert wird. Im Bild ragt er wie ein Schnabel in die Höhe. Die beidseitigen Schwimmkörper sind behelfsmäßig aus Platten syntaktischen Schaums aufgebaut, um durch Zugeben oder Weglassen weiterer Platten die optimale Eintauchtiefe des Stahlgestells zu ermitteln. Da die Winde des A-Krans nicht zur Verfügung stand, musste der Käfig mit einem Seitenkran ausgesetzt werden. Im Bild unten rechts grübeln Johannes Gelze und David Mischnick daher über das weitere Vorgehen.

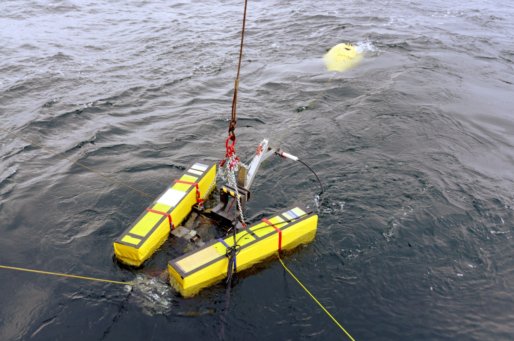
Der Bergekäfig verhielt sich nach dem Aussetzen mit dem Lastkran (siehe Bild unten links) im Wasser sehr gutartig. Die Eintauchtiefe entsprach den Anforderungen. Er ließ sich abschleppen und richtete sich so aus, dass eine Bootsaufnahme möglich gewesen wäre, vgl. Bild unten rechts.


Einbau der Nutzlastsektion in die PreToS
Bei den folgenden Ostsee-Testfahrten der PreToS sollte das Inertiale Navigationssystem (INS) zum Einsatz kommen. Für den Einbau der Komponenten war zusätzlicher Stauraum in Form der Nutzlastsektion (Payload) erforderlich. Dies ließ sich mit der Trennung des Bootskörpers zwischen den Sektionen vier und fünf sowie dem Einbau weiterer Tragrahmenteile aus Titanblech bewerkstelligen. Im folgenden Bild begutachten Oliver Preradović und Johannes Gelze zunächst die Trennstelle, um unter Beachtung der vielfältigen Kabelverbindungen die Separation der Sektionen durchzuführen.

Danach erfolgte die Montage von Tragrahmenteilen und deren Verschraubung mit dem Bootskörper (siehe Bild unten links), so dass der erforderliche Einbauraum für die INS und zusätzliche Akkumulatoren zur Verfügung stand, siehe Bild unten rechts.

Nutzlastsektion mit Einbauten (rechts)
Ostseefahrt mit der Elisabeth Mann Borgese, September 2012
Bei der Ostseefahrt im September 2012 mit der E. M. Borgese kam die durch die Nutzlastsektion verlängerte PreToS zum Einsatz, um zusammen mit dem Bergekäfig das Aussetzen und Aufnehmen des Boots zu üben. Das folgende Bild zeigt die PreToS ohne die Strömungshülle an Bord der E. M. Borgese sowie Johannes Gelze und David Mischnick, die Tauchfahrten vorbereiten. In der Mitte des Boots sind Teile der INS in der Nutzlastsektion zu erkennen.

Die PreToS absolvierte zunächst an der Darßer Schwelle Testfahrten an der Wasseroberfläche und anschließend Tauchmanöver, wobei das fahrzeugeigene Navigationssystem wichtige Daten zur späteren Funktionsanalyse sammelte.

Die Wasserung des Boots erfolgte mit dem A-Kran, zunächst noch ohne den Bergekäfig, welcher im Bild unten auf dem Heck der E. M. Borgese zu sehen ist.

Zur Vorbereitung der geplanten Aussetzung des Verbunds Bergekäfig und PreToS übten die Schiffsmannschaft und Johannes Gelze zunächst die Wasserung des Bergekäfigs, siehe folgendes Bild.

Bei der Handhabung der Aussetz- und Bergevorrichtung waren wir in hohem Maße vom Geschick der Schiffsbesatzung abhängig, die sowohl den Lastkran sowie den A-Kran als auch die zugehörigen Seilwinden bediente, siehe Bild unten.

Daher erläuterte David Mischnick auf dem Heck der E.M. Borgese einzelne Arbeitsabläufe des Bergevorgangs. Im Bild unten erklärt er die Fixierung des im Käfig sitzenden Boots mit dem Rasthaken.

Leider wurde die gute Stimmung der Arbeitsgruppe aufgrund des bisherigen erfolgreichen Verlaufs der Fahrt durch einen schweren Unfall getrübt: beim Aussetzen des AUVs riss das Stahlseil des Bergekrans und die PreToS stürzte auf das Schiffsdeck. Dabei entstanden am Bootsskelett, an Komponenten des Hauptantriebs, an der Ruderanlage und an der Strömungshülle erhebliche Schäden, siehe folgende Bilder.


Arbeiten in der Schlepprinne der TU Berlin, Dezember 2012
Bei schwerem Seegang erachteten wir das Einziehen des Boots in den Käfig sowie die weitere Abfolge des Bergevorgangs als recht schwierig, so dass wir beschlossen, hierzu Versuche in der Schlepprinne der Technischen Universität Berlin durchzuführen. Da die PreToS wegen der Reparaturarbeiten nicht zur Verfügung stand, bauten die Mitarbeiter des FMT einen Ersatzkörper, baugleich zur vorderen Hälfte des Boots, der sich anhand einer Motorwinde in den Käfig ziehen ließ.
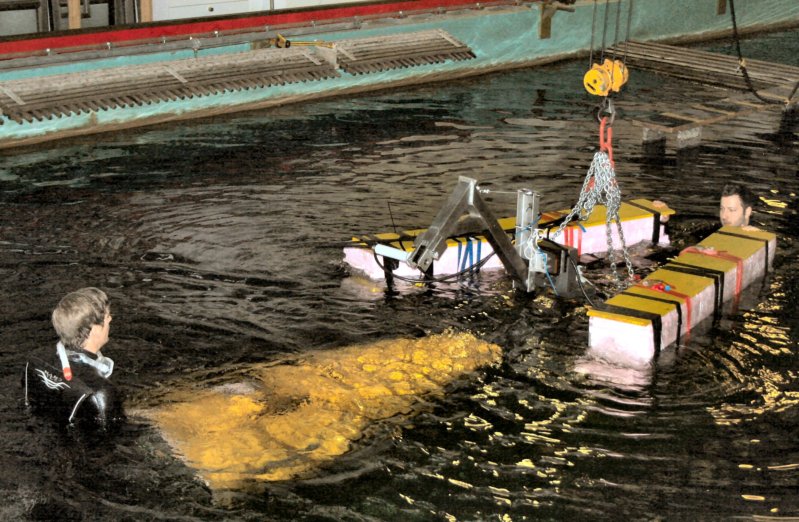
Um jedoch den Andockvorgang ausreichend genau zu überprüfen, war es unerlässlich, dass einzelne Mitarbeiter des Teams im Wasser direkt am Bergekäfig arbeiteten. Trotz der niedrigen Wassertemperaturen waren Johannes Gelze und Tino Schmidt bereit, sich den Fluten in Neoprenanzügen auszusetzen, siehe Bild unten. Und dies alles, obwohl das Wasser in der Schlepprinne seit Jahren nicht ausgetauscht worden war.

setzen den Bergekäfig ins Wasser

Eine Seilwinde im Bergekäfig diente zum Einziehen des Boots. Im Bild unten links beobachten Johannes Gelze und Tino Schmidt das Einziehen des Ersatzkörpers in die Ringöffnung am Bergekäfig und überprüfen die Genauigkeit des Sitzes, siehe Bild rechts.

Die horizontale Lage und die Winkelstellung des Probekörpers müssen präzise stimmen, damit der Rasthaken sauber einrastet. Dies gelang nicht immer, insbesondere in den Fällen, bei denen der Probekörper etwas schräg eingezogen wurde. Tino Schmidt und Johannes Gelze überlegten daher, welche Änderungen am Bergekäfig vorzunehmen sind, um die Führung des Boots beim Einzug zu verbessern, vgl. Bilder unten.


Prüfen des Einrastvorgangs mit Haken (rechts)
Ostseefahrt mit dem Forschungsschiff Alkor, Januar und Februar 2013
Bei dieser Ostseefahrt kamen der Bergekäfig sowie der Ersatzkörper der PreToS gemeinsam zum Einsatz, um experimentell das Aussetzen und das Einziehen des Boots in den Käfig sowie dessen Sicherung mit dem Rasthaken zu erproben. Da es sich hierbei nur um einen Teilschritt des Bergevorgangs handelt, wurde der Ausleger mit den Armgelenken nicht benötigt.
Zu Beginn der Bergungsübungen hievten wir den Verbund aus Käfig und Bootsersatz mit einem Lastkran vom Heck der Alkor in die Ostsee, siehe Bild unten links. Um die Kopplung des Bootskörpers mit dem Bergekäfig zu lösen, zog ein Crewmitglied auf der Alkor mit einem Bowdenzug den Sicherungsbolzen zurück, welcher die Bügelspitze mit einer Öse am Boot verbindet. Nach dem Rückzug des Bolzens lässt sich der Bügel mit einem Stahlseil anheben. Der Bootskörper entfernte sich bei leichter Fahrt der Alkor vom Käfig (siehe Bild unten rechts), blieb jedoch durch ein Seil über den Käfig mit dem Schiff verbunden.

Bootssicherung gelöst, der Bootskörper ist frei (rechts)
Beide Stahlseile, welche zur Betätigung des Bowdenzugs für den Sicherungsbolzen an der Bügelspitze (siehe Bild unten links) sowie zur Anhebung des Bügels dienen, gelangen vom Bergekäfig über Führungen an das Heck der Alkor, wo man sie mit zwei Handwinden aufspulen oder lösen kann, vgl. Bild unten rechts.


zwei Handwinden für den Bowdenzug sowie die Anhebung des Bügels (rechts)
Bei der Bergung des Boots findet der zeitlich umgekehrte Prozess statt, indem man den Ersatzkörper durch das Aufspulen einer Bergewinde zum Bergekäfig zieht. Kritisch ist dabei das präzise Einfädeln des Bootskörpers in die runde Käfigöffnung sowie die passgenaue Ausrichtung des Boots für das Absenken und Einrasten des Bügels. Um das Boot mit dem Käfig fest zu verbinden, zieht man den Sicherungsbolzen an der Bügelspitze mit dem Bowdenzug zurück, senkt den Rastbügel ab und lässt den Sicherungsbolzen durch die Öse am Boot gleiten.
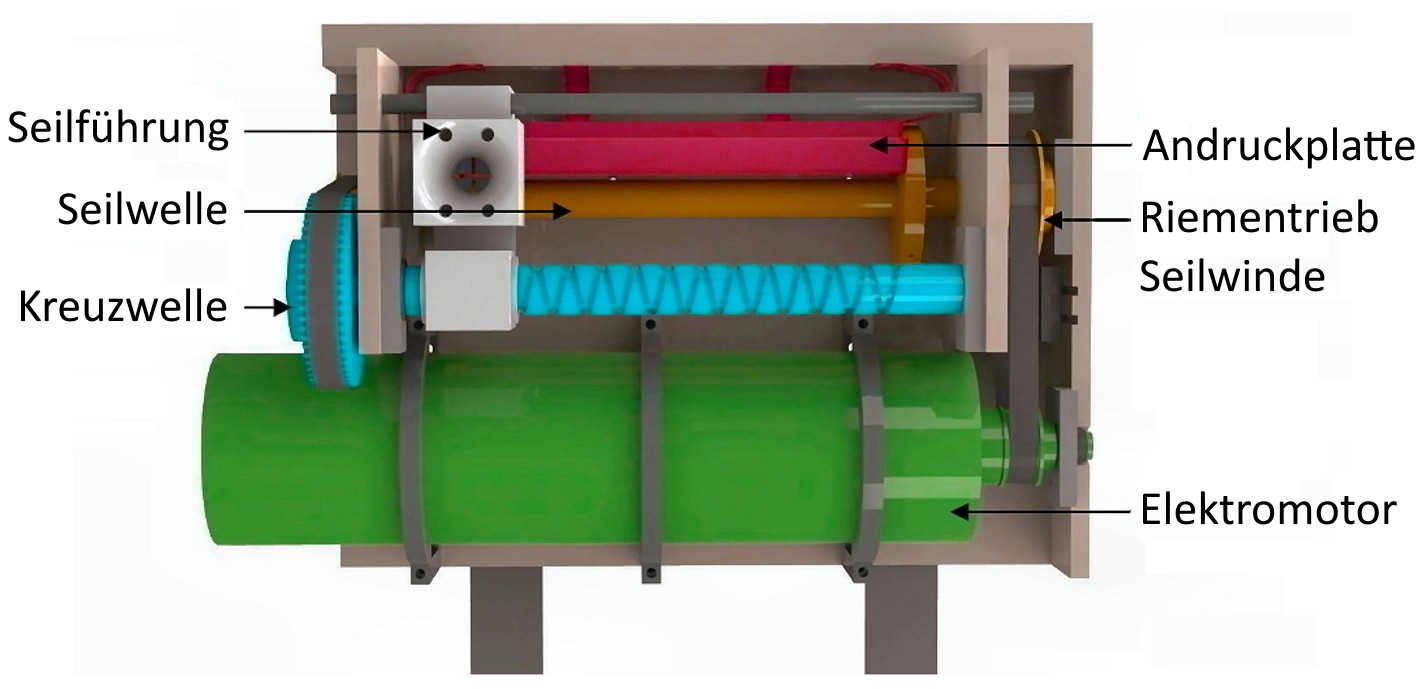
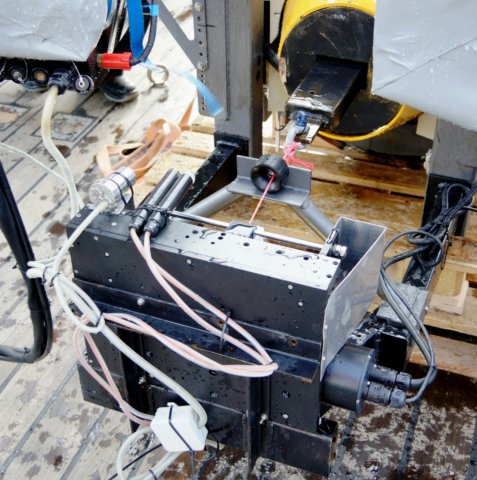
Der im Wasser schwimmende Bootskörper wird mit einer elektrischen Motorwinde, welche auf dem Schiffsheck fest installiert ist, in die Käfigöffnung gezogen. Dabei treibt ein Gleichstrommotor eine Trommelwelle an, um das Seil aufzuspulen. Eine Wickelvorrichtung mit einer Kreuzwelle sorgt für das geordnete Aufspulen des Seils, damit auf der Trommel Windung an Windung liegt. Eine abgefederte Andruckplatte drückt die aufgespulten Seilwindungen an die Trommel, was ein Abwickeln des Seils im entspannten Zustand verhindert. Das Bild unten links zeigt eine schematische Darstellung der Motorwinde, rechts daneben ist die auf dem Heck der Alkor befestigte Winde zu sehen.
Das Bild unten zeigt Johannes Gelze und Tino Schmidt, die den Einsatz des Käfigs mit dem Bootskörper bei beißender Kälte vorbereiten. Der Bügel ist abgesenkt und mit einem über eine Druckfeder gesicherten Bolzen in einer Metallöse des Bootskörpers fixiert. Der Bowdenzug zur Bewegung des Bolzens führt an die Bügelspitze, wo sich eine weiße Hülse mit der Druckfeder befindet. Im Bild erkennt man auch den Seilzug zur Anhebung des Bügels. Beide Seilzüge lassen sich durch die oben gezeigten Handwinden an Bord der Alkor betätigen.

Käfig und Ersatzkörper sind durch den Bügel verbunden
Aufbau der Auslegervorrichtung für das Bergesystem, April 2013
Die Firma Edelstahl-Haese fertigte und lieferte die Einzelteile des Ausleger-Systems für die Bergevorrichtung im April 2013, so dass wir umgehend mit dem Aufbau des Auslegers in der FMT-Arbeitshalle beginnen konnten. Um die Funktion des LARS (launch and recovery system) zu prüfen, verschraubten wir den Bergekäfig mit den Auslegerarmen. Da die in Reparatur befindliche PreToS noch nicht zur Verfügung stand, behalfen wir uns mit dem Ersatzkörper im Käfig und bewegten den Ausleger mit dem Hallenkran, entsprechend der Funktion eines A-Krans auf einem Schiff. Der Ausleger besteht aus zwei Armelementen, die über Scharniere verbunden sind.
Die nächsten Bilder zeigen den Ausleger mit dem Bergekäfig und dem Ersatzkörper in der Stellung, welche der Ausgangsposition für das Aussetzen der PreToS mit Blick auf das Heck eines Forschungsschiffs entspricht. Die Auslegerarme sind in den rechts- und linksseitigen Lagerböcken gelagert, die fest auf der Bodenplatte des Schiffs verschraubt werden. Das Bild unten links stellt die Ansicht des LARS von der Seeseite dar, während im rechten Bild die Startposition am Heck eines Forschungsschiffs zu sehen ist. Bei dem Aussetzvorgang wird der Auslegerarm mit dem Bergekäfig angehoben und nach vorn gekippt, so dass die mit dem Auslegerarm fest verbundenen Schwimmkörper auf dem Wasser aufsetzen.


Auslegerarm mit Bergekäfig und Ersatzkörper in der Ausgangsstellung
(Heckansicht rechts)
Insgesamt zeigten die Versuche in der Halle, dass das Ausleger-System voll den Anforderungen entsprach und wir damit optimistisch dessen Betrieb auf dem Heck eines Forschungsschiffs entgegensehen konnten.
Arbeiten in der Schlepprinne der TU Berlin, Mai 2013
Nach der Reparatur der PreToS war es erstmals möglich, in der Schlepprinne der TU Berlin Koppelmanöver des Bergekäfigs mit dem kompletten AUV durchzuführen. Allerdings musste das Boot infolge einer Reihe neuer Einbauten zunächst getrimmt werden, um dessen Lage im Wasser und seine Eintauchtiefe festzulegen. Wir führten dies in einem Abschnitt der TU Schlepprinne durch, siehe Bild unten.

Bei den Koppelmanövern wurde deutlich, dass sich die Einziehung des kompletten Fahrzeugs in den Käfig aufgrund der (verglichen mit dem Ersatzkörper) größeren Masse und Länge der PreToS erheblich schwieriger gestaltet. Dies zeigte sich vor allem bei wellenbewegtem Wasser. In der Folge galt es daher, den Eingangsbereich des Bergekäfigs so umzugestalten, dass die Einkopplung der PreToS auch bei einer Schrägstellung des Fahrzeugs sowie bei starkem Wellengang sicher abläuft. Nach diversen Änderungen war alles zum Abtransport für den nächsten Einsatz in der Ostsee bereit, siehe Bild unten.

Ostseefahrt mit dem Forschungsschiff Elisabeth Mann Borgese im Juni 2013
Auf dieser Fahrt konnten wir erstmalig das gesamte Aussetz- und Bergesystem (LARS) für Aussetzmanöver auf See verwenden, allerdings nur in Verbindung mit dem Ersatzkörper, da die PreToS wegen der Störanfälligkeit der Bordelektronik von Enitech überarbeitet wurde.
Somit war es erforderlich, das gesamte Auslegersystem, den Bergekäfig sowie den Ersatzkörper von der TU Berlin an den Rostocker Hafen zu transportieren, um die Einzelteile des LARS auf das Schiff zu verladen und dort aufzubauen. Der Lastwagen mit den LARS-Einzelteilen, dem Käfig und dem PreToS-Ersatzkörper fuhr im Rostocker Hafen direkt an die Bordwand der Elisabeth Mann Borgese, siehe nächstes Bild.

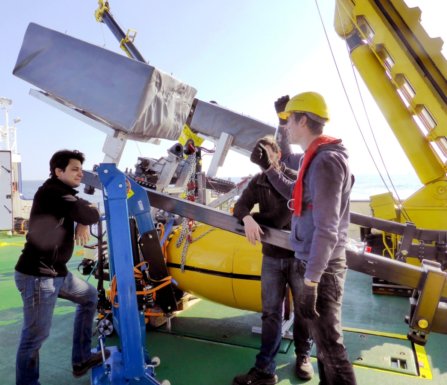
Ein Schiffskran beförderte die Einzelteile zum Heck des Schiffs, wobei Tino Schmidt und Romon Chakrabarti (siehe folgendes Bild) darauf achteten, die vorher festgelegte Transportfolge einzuhalten.

Johannes Gelze nahm die Teile am Heck der Elisabeth Mann Borgese in Empfang (siehe Bild unten) und platzierte sie montagegerecht auf der Bodenplatte des Schiffshecks, wo beispielsweise die Lagerböcke fest verschraubt wurden.

Das Auslegersystem ist modular gestaltet und so konstruiert, dass sich dessen Standfüße auf allen Bodenplatten der Forschungsschiffe befestigen lassen, die für die Forschungsfahrten vorgesehen wurden. Im folgenden Bild verschrauben Tino Schmidt und Romon Chakrabarti den linken Lagerbock auf der Bodenplatte, währenddessen Johannes Gelze den Schwenkarm aufbaut.

Das nächste Bild zeigt Romon Chakrabarti, Johannes Gelze und im Hintergrund Tino Schmidt am Bergekäfig mit dem Ersatzkörper und dem Ausleger. Sie besprechen auf der Elisabeth Mann Borgese die Abfolge des Aussetzmanövers auf See.
Die folgenden Bilder illustrieren einzelne Phasen des Aussetzvorgangs. Im ersten Schritt hievt die Winde des A-Krans den Bergekäfig an. Dieser ist am Auslegerarm befestigt, so dass hierbei ein Teil des Auslegerarms ankippt. Man beachte, dass die Schwimmkörper am Ausleger zu diesem Zeitpunkt nach oben zeigen.
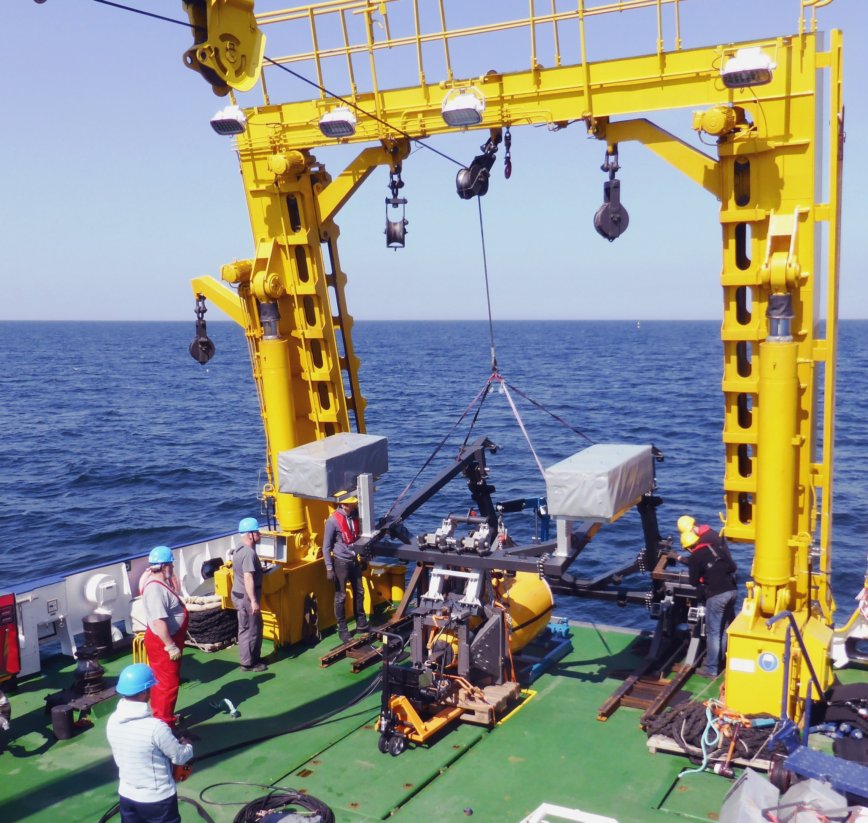
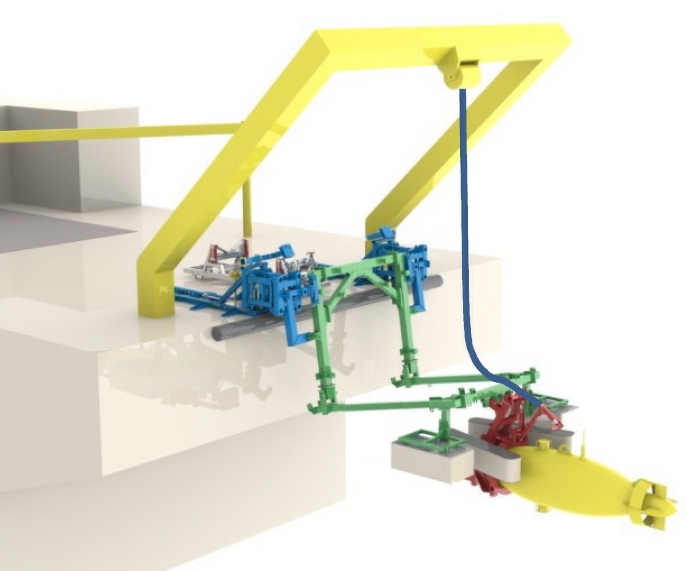
Im weiteren Verlauf schwenkt der Rahmen des A-Krans über das Heck nach hinten, wodurch der Auslegerarm mit den Schwimmkörpern weiter kippt. Der Bergekäfig behält dabei aufgrund der drehbaren Aufhängung am Auslegerarm seine Ausrichtung parallel zur Wasseroberfläche bei.

Im nächsten Bild ist zu sehen, dass der A-Kranrahmen schließlich seine maximal mögliche Neigung erreicht hat, wodurch sich der zweiteilige Auslegerarm entfalten kann.

Der Bergekäfig lässt sich schließlich mit der Winde des A-Krans wassern, wobei sich der untere Teil des Schwenkarms weiter senkt. Der Käfig bleibt mit dem Schwenkarm verbunden und treibt aufgrund der Schwimmkörper am Ausleger auf dem Wasser. Infolge der Drehgelenke des Auslegers wird die Wellenbewegung des Käfigs vom Seegang des Schiffs entkoppelt.

vom Seegang des Schiffs im Wasser
Als Ergebnis dieser Manöver ist festzuhalten, dass das Zusammenspiel von A-Kran und LARS bei den Aussetz- und Bergevorgängen nach entsprechenden Übungen der Schiffsmannschaft sehr gut funktionierte. Weiterhin zeigte sich insbesondere bei hohem Wellengang die unabhängige Bewegung des Käfigs und des Schiffs, eine wesentliche Voraussetzung für sichere Aussetz- und Bergemanöver mit der PreToS.
Testfahrten im Hafen von Rostock, Juli und August 2013
Bei den Testfahrten der PreToS stellte es sich heraus, dass bei hohen Umdrehungszahlen des Hauptantriebs Störungen der Kommunikationseinrichtungen auftraten. Das Boot verblieb daher einige Zeit bei Enitech, um Änderungen der elektrischen Anschlüsse an den Geräten vorzunehmen sowie zur Installation eines robusten Erdungssystems. Zwischenzeitlich fanden Testfahrten im Hafen von Rostock statt, um experimentell den Erfolg der Umbauaktionen zu testen. Nach der Sternverdrahtung der Erdungsleitungen ließ sich das Boot auch mit hohen Umdrehungszahlen des Hauptantriebs problemlos steuern.
Weiterhin erfolgte der Einbau des inertialen Navigationssystems (IMU), so dass bei den Testfahrten die Filter für die Messdaten der Sensoren justiert und erste Ergebnisse über die Funktion des Systems und die Genauigkeit der Ortung gewonnen wurden.

nach Verbesserung der Ausfallsicherheit und Einbau der IMU
Ostseefahrt mit der Elisabeth Mann Borgese, August 2013
Bei dieser letzten Ostseetestfahrt vor dem großen Atlantikeinsatz galt es, letzte Mängel bei dem Aussetz- und Bergeprozess zu beheben und die Ablaufszenarien einzuüben. Grundsätzlich war zu erwarten, dass der Einsatz des LARS aufgrund seiner Konzeption bei höherem Wellengang im Atlantik im Vergleich zur bisherigen Methode der Wasserung und Aufnahme des Boots mit einem Kran erheblich mehr Sicherheit bietet.
Dabei war es wichtig, die Schwimmkörpertechnik zur Bergung des Boots zu üben. Nach dem Ende eines Tauchgangs fährt die PreToS an das Forschungsschiff heran und stößt von seiner Nase einen Schwimmkörper ab, welcher aus Syntaktischem Schaum besteht und über ein Seil mit dem Boot verbunden ist, vgl. Bild unten.

Die Schiffsmannschaft nimmt den Schwimmkörper aus dem Wasser auf und verbindet das Seil mit der elektrischen Winde am Bergekäfig, welcher sich zu diesem Zeitpunkt noch auf dem Schiffsheck befindet und anschließend mittels A-Kran und Ausleger ausgesetzt wird. Sobald der Käfig freischwimmt, zieht die Bergewinde das Boot in den Käfig.
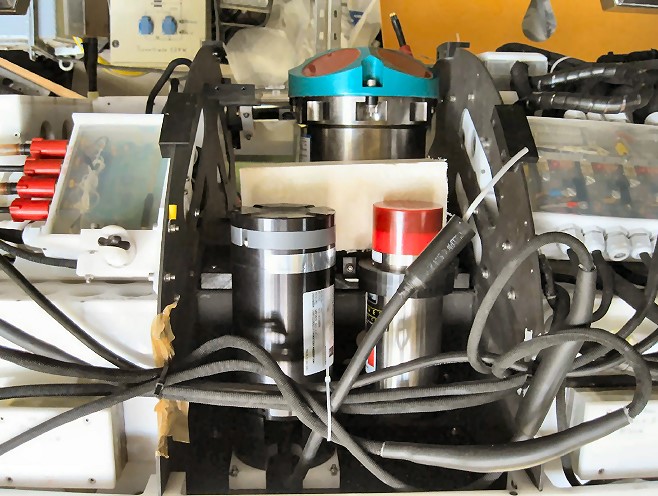
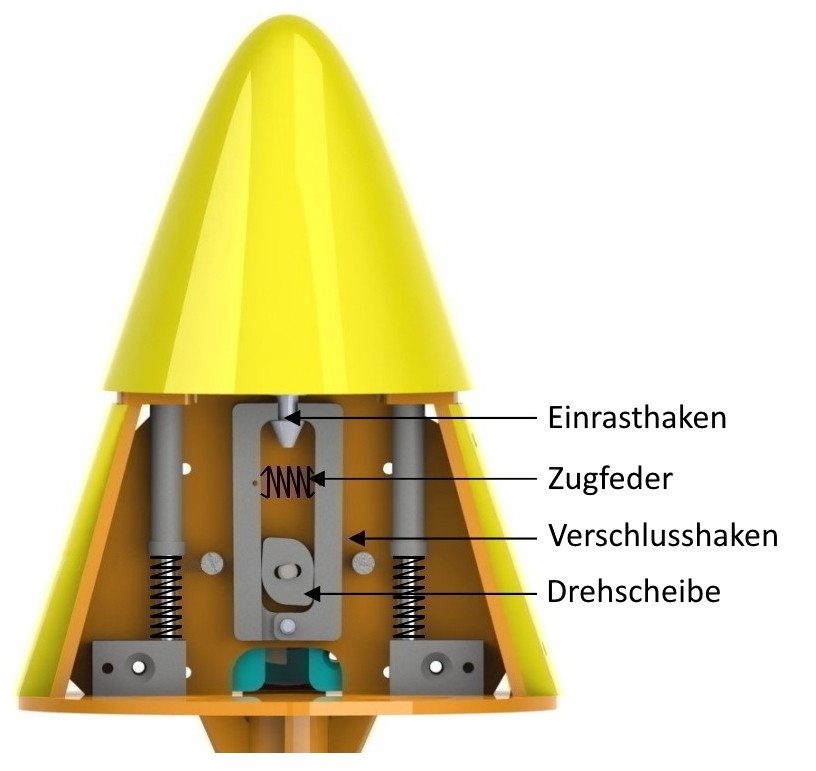
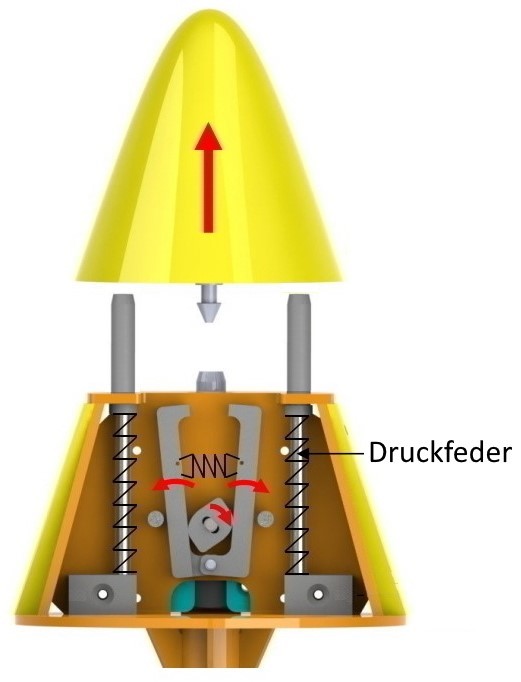
Die sichere Auslösung des Schwimmkörpers an der Nase der PreToS ist für den Bergeprozess von grundlegender Bedeutung und erfordert eine robuste Mechanik. Der von David Mischnick und Oliver Preradović entwickelte Abwurfmechanismus nutzt zwei Verschlusshaken und eine Zugfeder, welche den Einrasthaken des Schwimmkörpers im gesicherten Zustand festhalten, siehe Bild unten links. Zur Öffnung des Verschlusses dreht ein Elektromagnet eine Exzenterscheibe (Drehscheibe), wodurch die Verschlusshaken aufklappen und den Einrasthaken freigeben (vgl. Bild unten rechts), so dass die in den Druckfedern gespeicherte Energie den Abwurf des Schwimmkörpers bewirkt.
Das Bild unten zeigt Johannes Gelze und David Mischnick, die während der Überprüfung aller Bordsysteme sowie dem Check des Ladezustands der Akkumulatoren zur Vorbereitung der Tauchmanöver den Abwurfmechanismus an der Nase präparieren. Nach der Aufwicklung des Seils in der Vertiefung am Bootskörper drückt man den Schwimmkörper gegen die Federspannung der Druckfedern in Richtung des Bootskörpers, bis der Einrasthaken greift. Danach werden die Strömungshüllen angebracht und das Boot für das Aussetzmanöver im Bergekäfig fixiert.

Das folgende Bild zeigt den Beginn eines Aussetzmanövers am Heck der E. M. Borgese. Der A-Kran des Schiffs hievt den Auslegerarm samt Bergekäfig mit PreToS hoch. Dabei führt Tino Schmidt das Kabel des Bowdenzugs. Zu beachten ist, dass der Bergekäfig nunmehr zusätzlich mit Schwimmkörpern versehen ist, da die bisherigen Tests mit dem LARS ausschließlich mit dem Ersatzkörper erfolgten, der erheblich leichter ist als die voll ausgerüstete PreToS, so dass diese zusätzlichen Schwimmer bisher nicht erforderlich waren.
Ein Mitglied der Schiffsmannschaft (im Bild unten, links) steuert die weitere Neigung des A-Krans. Währenddessen überwachen Johannes Gelze und Tino Schmidt den Ablauf der Prozedur. Tino Schmidt positioniert sich rechts an der Winde, um beim Wassern des Käfigs mit dem Bowdenzug den Sicherungsbolzen zu lösen sowie den Bügel anzuheben, damit die PreToS freischwimmen kann.

Die folgenden Bilder zeigen die Wasserung des Käfigs mit der PreToS (Bild unten links). Nach der Lösung des Sicherungsbolzens und der Anhebung des Bügels kann das Boot freischwimmen (Bild unten rechts).


Insgesamt ist festzuhalten, dass die Aussetz- und Bergemanöver mit dem LARS und der PreToS nach einiger Übung sehr erfolgreich verliefen. Dabei wurde deutlich, dass diese Aussetzmethode, verglichen mit der bisherigen Vorgehensweise, eine erhebliche Verbesserung bei der Sicherheit des Ablaufs und ein wesentlich geringeres Unfallrisiko bieten. Wir fühlten uns daher für die folgende Atlantikfahrt gut gerüstet.
Transport des Aussetz- und Bergesystems, Aufbau auf einem Forschungsschiff
Aufgrund der praktischen Erfahrungen mit dem Aussetz- und Bergesystem war es im Verlauf der Entwicklung erforderlich, nach jedem Einsatz Verbesserungen vorzunehmen, um vor allem den Bergeprozess sicher zu gestalten. Daher demontierten wir die Ausleger und den Käfig nach jedem maritimen Einsatz, zerlegten sie in transportable Teile und beförderten sie in unsere Arbeitshalle an der Technischen Universität Berlin. Bei dem Entladen der Container war die Krananlage in unserer Halle sehr hilfreich, da die Schiene für die Laufkatze der Krananlage aus der Halle herausführt, so dass sich auch schwere Teile leicht bewegen ließen, siehe folgende Bilder, welche aus dem Bürofenster von Prof. Lehr aufgenommen wurden.


Nach den Einsätzen in der Ostsee und dem Atlantik waren mehrere Modifikationen des Käfigs erforderlich, um die Sicherheit beim Bergungsprozess zu gewährleisten, so dass die Teile des LARS nach der Überarbeitung in unserer „Werft“ für den nächsten Einsatz gepackt und wieder abtransportiert wurden, siehe folgende Bilder.


die schwere Last lässt sich mit dem Laufkran gut bewegen
Bei der Planung des Aussetz- und Bergesystems war nicht bekannt, welche Forschungsschiffe wir für die Erprobung der PreToS nutzen können. Somit war es erforderlich, das System modular auszulegen, damit es auf jedem der in Frage kommenden Schiffe entsprechend der jeweiligen räumlichen Verhältnisse montierbar ist. Die folgenden Bilder demonstrieren den Aufbau des Schwenkarm-Systems auf dem Forschungsschiff Poseidon. Startpunkt ist die Montage der Laufschienen für die Lagerböcke, siehe Bild unten.

Danach erfolgt auf der Heckplatte die Verschraubung der Lagerböcke, die als Drehlager für die Auslegerarme dienen, siehe Bild unten.

Nach der Anlieferung der Einzelteile baut die Crew den Schwenkarm auf, siehe folgendes Bild.

Es folgt die drehbare Aufhängung des Schwenkarms an den Lagerböcken, siehe Bild unten.

Nach der Montage der Schwimmkörper des Schwenkarms erfolgt dessen Anhebung mit der Seilwinde des A-Krans, siehe Bild unten.

Durch die Anhebung des Schwenkarms lässt sich der Käfig problemlos an seine drehbare Armlagerung montieren, siehe folgendes Bild.

Nach der weiteren Anbringung der Schwimmkörper des Käfigs ist der Aufbau des Schwenkarm-Systems abgeschlossen, siehe folgendes Bild.

Nach der letzten Atlantikfahrt kehrte die PreToS wieder in die Montagehalle an der TU Berlin zurück. Die Bilder unten zeigen den Transport des Boots auf der Helling von der Ladefläche eines Lastwagens in unsere „Werft“, wobei sich wie bei allen vorherigen Reisen der PreToS der Laufkran auch hier wieder bewährte.

