8 Innovative Medizintechnik: OP-Einrichtungen und Endoskope
Nachdem sich mein Team über die Jahre profunde Kenntnisse in der Elektromechanik, Magnetik und Optik erarbeitete sowie eine solide Ausbildung in der Konstruktionstechnik und zahlreichen ingenieurtechnischen Datenverarbeitungstools vorweisen konnte, trieben wir, gestützt auf diese interdisziplinären Fähigkeiten, gezielt die Fortentwicklung der Endoskopie voran. Es entstanden bei uns höchst innovative Produkte für diesen Zweig der Medizintechnik, so dass bald alle führenden Endoskop-Anbieter unsere Auftragsgeber wurden. Wir entwickelten zum Beispiel: Autofokus- und Zoomendoskope, konventionelle und kabellose Stereoendoskope, Endoskope mit variablem Seitenblick, Endoskope mit LED-Lichttechnik sowie ein RGB-Laserendoskop (siehe hierzu Kapitel 7). Der größte Anteil dieser Entwicklungen wurde von uns durch Patente abgesichert, welche die Partnerfirmen sofort übernahmen. Mit dem nachfolgend beschriebenen Verbundprojekt „Endoguide“, gefördert vom Bundesministerium für Bildung und Forschung, setzten wir die o. g. Anstrengungen konsequent und erfolgreich fort.
Zusammen mit der Karl Storz GmbH sowie ihrer Firmentochter H2O entwickelten wir ab 2007 eine Reihe neuer Antriebe für die Linsensysteme in Chip-on-the-Tip-Kameras und bauten im Rahmen bilateraler Projekte komplette Endoskope auf. Hierbei entstand die Idee, die Technik der laparoskopischen Eingriffe neu zu gestalten und insbesondere auf die Kameraassistenz zur Führung des Endoskops zu verzichten.
In dem vom BMBF finanzierten Projekt Endoguide wurden von den Projektpartnern FIRST, Karl Storz GmbH, H2O / MIC GmbH, Paul Peschke GmbH sowie meinem Fachgebiet interdisziplinäre Lösungen erarbeitet, um die Ergonomie sowie die Sicherheit bei der Laparoskopie zu erhöhen und die laufenden Kosten zu senken.
Endoskopisch unterstützte minimal-invasive Eingriffe hinterlassen geringe Verletzungen und führen in der Regel zu einer schnellen Genesung der Patienten. Bei den Operationen betätigt der Chirurg mit beiden Händen Instrumente mit langem Schaft, die durch kleine Einschnitte in den Bauchraum eingeführt werden. Die Hand-Auge-Koordination des Arztes ist allerdings stark behindert, da ein hinter ihm stehender Assistent das Endoskop hält und es auf seine Anweisung schwenkt, um das Sichtfeld zu erweitern. Der Chirurg kann infolge der Präsenz des Assistenten nicht mehr frei agieren, wobei auch dessen starre Haltung schnell zu seiner Ermüdung führt.
In den letzten Jahren wurden daher Halterungen entwickelt, an denen man Endoskope beweglich befestigen oder auch aktiv bewegen kann, mit dem Ziel, den Assistenten zu ersetzen. Bei einer wesentlichen Änderung der Blickrichtung ist es jedoch erforderlich, die Endoskophalterung neu zu justieren, wobei meist beide Hände des Chirurgen benötigt werden. Dies führt zu Unterbrechungen und verlängert den Eingriff. Die für den Einsatz im OP-Bereich kommerziell vertriebenen Haltevorrichtungen wurden entweder an der OP-Liege befestigt oder es handelte sich um fahrbare Einheiten, die seitlich davon stehen, wodurch gleichermaßen die Bewegungsfreiheit des Chirurgen eingeschränkt wird. Eine weitere Behinderung stellen die am Boden geführten Kabel oder Schläuche dar.
Im Projekt Endoguide verfolgten wir einen völlig neuen Ansatz, indem wir eine bewegliche Endoskop-Haltevorrichtung an der Decke anbrachten, so dass die Zugänglichkeit zum Patienten keiner Einschränkung unterliegt. Das Endoskop wird durch eine mechanische Halterung fixiert und muss somit während der Operation nicht manuell bewegt werden. Dadurch sinkt die Gefahr, den Patienten mit dem Endoskop zu verletzen. Die motorisierte Endoskopaufnahme stellt eine weitere Innovation dar, da sie eine beliebige Einstellung des Blickwinkels sowie Zoom- und Fokusaktionen erlaubt. Dabei kann der Arzt wahlweise verschiedene Schnittstellen nutzen, um die Blickrichtung des Endoskops zu lenken, beispielsweise durch Fußschalter oder durch Sprach-, Gesten- und Blicksteuerung. Insgesamt entstand im Rahmen des Projekts Endoguide ein innovatives Assistenzsystem, welches die Tätigkeit der Chirurgen bei minimal-invasiven Eingriffen erheblich erleichtert und für die zukünftige Gestaltung von Operationsräumen neue Perspektiven liefert.
Die Entwicklungsziele des Projekts Endoguide betrafen die Unterstützung des Chirurgen durch den Einsatz von Virtual Reality (VR)- / Augmented Reality (AR)-Techniken sowie die Substitution des Assistenten durch eine flexible Halterung des Endoskops, die aus einer an der Decke befestigten Haltevorrichtung mit vielen Freiheitsgraden besteht, so dass jede beliebige Position am Patienten erreichbar ist. Infolge der Deckenmontage verlaufen keine den Operateur behindernden Versorgungsleitungen am Boden. Durch eine motorische Deckenverfahreinheit lässt sich der Haltearm bei Nichtbenutzung aus dem Operationsfeld fahren.
Im Rahmen dieses Entwicklungsprojekts erzielten meine Mitarbeiter eine Reihe herausragender Neuentwicklungen. Hierzu zählen der Deckenarm mit verschiedenen flexiblen Haltesystemen, Bewegungsvorrichtungen um das Endoskop oder auch die Endoskopspitze in dem vom Operateur gewünschten Raum zu bewegen sowie auch die Ausstattung bestehender Endoskopkameras mit automatisierten Autofokus- und Zoomeinrichtungen, wobei wir, so weit möglich, alle Entwicklungen anhand von Patentanmeldungen absicherten, die von Karl Storz übernommen wurden.
Positionier- und Haltevorrichtung
Die Positionier- und Haltevorrichtung ist mittels eines Schienensystems an der Decke montiert. Der Aufbau setzt sich aus legierten Aluminiumrohren zusammen, die durch eine Vielzahl arretierbarer Drehgelenke verbunden sind. Hieraus resultiert eine hohe Bewegungsfreiheit, so dass sich ein Endoskop an beliebigen Positionen und allen erforderlichen Winkelstellungen an dem Patienten fixieren lässt und der Operateur frei agieren kann. Der Arm lässt sich wegklappen oder auch über eine Deckenschiene aus dem Operationsfeld fahren. Die folgende schematische Darstellung zeigt die Haltevorrichtung in Arbeitsstellung, wobei sie ein Endoskop hält.
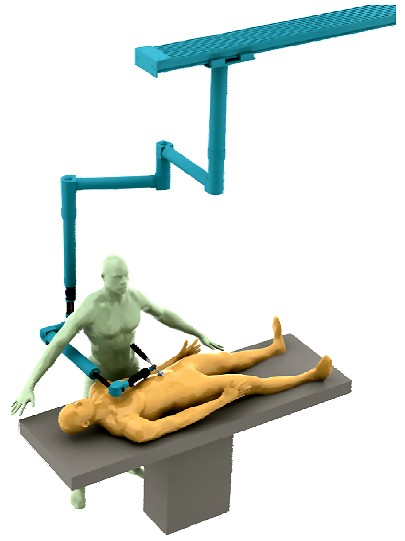
Der Haltearm lässt sich an einer Deckenschiene zum OP-Tisch fahren. Die oberen drei Gelenke des Arms dienen zur Vorpositionierung des unteren Teils. Die Feinjustage der Endoskopstellung erfolgt über die Ausrichtung der unteren Armsegmente. Die Idee zur Gestaltung sowie die Ausführung des Haltearms beruhen hauptsächlich auf Arbeiten von Dipl.-Ing. Stefan Oginski.
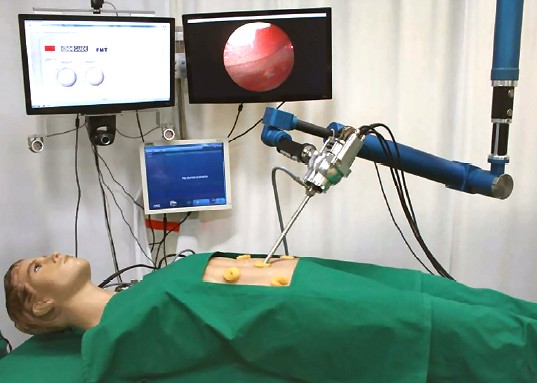
Das Bild unten zeigt einen Kunstpatienten auf einer Liege in einem für das Entwicklungsprojekt geschaffenen Drylab-Versuchslabor, das wir zu Übungs- und Demonstrationszwecken als OP-Bereich einrichteten. Der Schaft des am Haltearm fixierten Endoskops befindet sich im Abdomen, so dass der Arzt am dahinter befindlichen Monitor die Aufnahme eines Teils des Bauchraums inspizieren kann.
Das von uns entwickelte Haltesystem verfügt über eine Vielzahl von Freiheitsgraden zur Änderung der Blickrichtung des Endoskops. Um eine Rundumschau des Arbeitsbereichs zu gewinnen, kann der Chirurg wahlweise durch Fußschalter oder durch Sprach-, Gesten- und Blicksteuerung den Schaft drehen, die Endoskopspitze abknicken oder anhand einer Zoomoptik den Blickwinkel und damit die Bildvergrößerung ändern (siehe hierzu Kapitel 7). Dies bietet dem Arzt die Möglichkeit, frei zu agieren und ohne die Hilfe eines Endoskopassistenten den gewünschten Bereich im Abdomen zu untersuchen.

Der Monitor rechts zeigt eine Aufnahme aus dem Abdomen
Das Endoskop ist am vorderen Ende einer verschiebbaren Teleskopstange über eine lösbare Kupplung fixiert, so dass der Arzt bei der Einführung des Endoskops in das Abdomen anhand einer Vielzahl von Dreh- und Kugelgelenken die Position und den Winkel des Endoskops frei einstellen kann (siehe Bild unten). Ist die gewünschte Endoskopstellung erreicht, lassen sich die Gelenke des Arms mit Bremsen feststellen. Die zugehörige Bedieneinheit befindet sich über dem rechtwinklig abknickenden Gelenk mit der anschließenden Teleskopführung. In der folgenden Abbildung demonstriert Dipl.-Ing. Stefan Oginski den Gebrauch des Teleskoparms und der Gelenke bei der Einführung des Endoskops in das Abdomen eines Patienten.

Elemente des Haltearms
Die
drei Drehgelenke im oberen Teil des Haltearms werden aufgrund der
vorliegenden Hebelarme durch Biegebelastung und Torsionsbeanspruchung
am stärksten beansprucht. Um die zum Betätigen und Lösen der
Bremsen nötige Aktorkraft zu reduzieren, nutzten wir
Lamellenbremsen. Zum Lösen der Bremse zieht ein Aktor den
Klemmschlitten von den Bremslamellen weg, wodurch sich das Gelenk
drehen lässt.
Hierfür
kann man einen Elektromagneten nutzen, der anhand Reluktanzkraft die
durch Federn zusammengedrückten Bremslamellen löst. Untersuchungen
zeigten jedoch, dass sich eine ausreichende Kraftwirkung nur durch
einen großen und schweren Elektromagneten erzielen lässt. Daher
wurde diese Lösung verworfen.
Als weitere Variante kam ein Elektromotor mit Gewindespindel in Betracht, wobei eine Spindelmutter über mehrere Druckfedern gegen die Bremslamellen drückte. Das Bremsmoment lässt sich über den Spannweg der Druckfedern einstellen. Da hierfür ein Servogetriebemotor mit Ansteuerung erforderlich ist, resultieren hohe Kosten. Schließlich lassen sich aufgrund der im Inneren drehenden Spindel keine elektrischen, bzw. pneumatischen Leitungen durch die Gelenke führen. Die motorische Lösung wurde daher ebenfalls nicht weiterverfolgt.
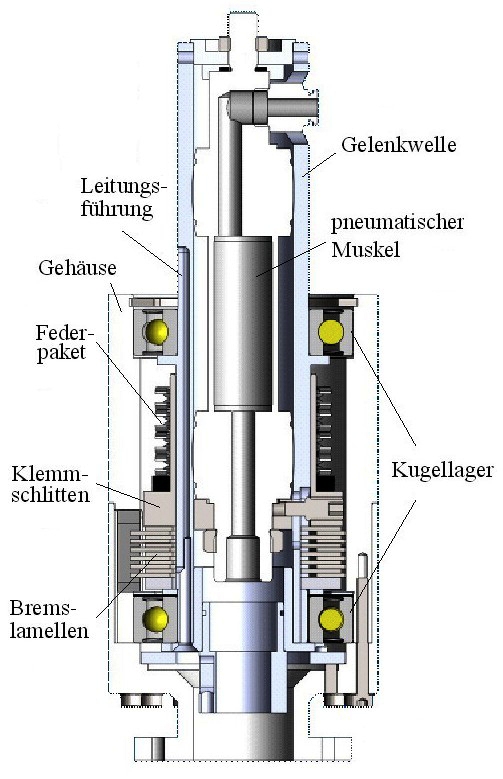
Bei
den pneumatischen Aktoren boten sich pneumatische Muskeln an (Firma
Festo), die sich bei Druckbelastung kontrahieren und eine hohe
Anfangskraft liefern. Zum Lösen einer Lamellenbremse reichen wenige
Millimeter Weg. Pneumatische Muskeln erwiesen sich daher als
geeignete Lösung. Die Abbildung unten links gibt die
Schnittzeichnung eines Drehgelenks wieder, das durch einen
pneumatischen Muskel gelöst wird. Es erfordert einen Betriebsdruck
von mindestens fünf bar und wiegt 3,5 Kilogramm bei einem
Außendurchmesser von 90 Millimeter.
Die
Abbildung unten rechts zeigt ein fertig montiertes Drehgelenk. Auf
der Oberseite sind ein Druckluftschlauch und ein Kabel mit
Steckverbinder erkennbar. Die elektrischen Leitungen dienen zur
Medienversorgung des unteren Teils des Haltearms. Sie werden anhand
von zwei in der Gelenkwelle eingelassenen Nuten durch das Gelenk
geführt. Der Druckluftschlauch zur Versorgung der verbleibenden
Gelenke verläuft durch den pneumatischen Muskel. Die Gelenke
lassen sich beliebig drehen, da kommerzielle Drehdurchführungen die
elektrischen Leitungen vor dem Tordieren schützen, während eine
Eigenentwicklung die drehsichere Durchführung der pneumatischen
Leitungen gewährleistet.

fertig aufgebautes Drehgelenk (rechts)
Die pneumatische Arretierung der Gelenke lässt sich mit Steuerschaltern lösen, die sich oberhalb eines Gelenks mit horizontaler Drehachse befinden (siehe Abbildung unten rechts). Das Gelenk definiert die Neigung des angeschlossenen Teleskops. Eine Schnittansicht dieses Gelenks (Abbildung unten links) veranschaulicht dessen Aufbau. Anstatt eines pneumatischen Muskels findet ein Kolbenaktor mit geringer axialer Baulänge Anwendung. Die Druckluft schiebt den Kolben in das Innere des Gelenks und verrückt dabei den Druckstift, die Druckhülse sowie den Klemmschlitten, so dass sich die Bremslamellen lösen, das Gelenk ist drehbar.
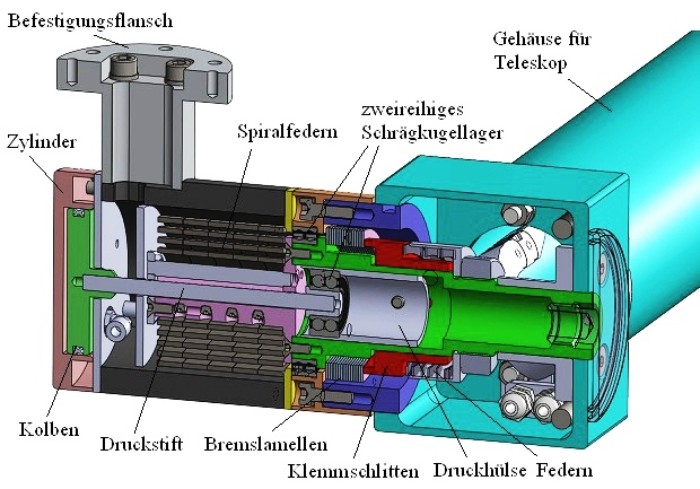

Drehgelenk zur Einstellung der Teleskopneigung mit den Steuerschaltern (rechts)
Mit dem Teleskoparm (Bild unten) lässt sich das Endoskop längs verschieben und um die Mittelachse des Arms drehen. In der Halteposition des Endoskops ist es daher erforderlich, die Translation sowie die Rotation durch geeignete Bremsen zu blockieren.

Die Blockade der Translationsbewegung erfolgt anhand einer verschiebbaren Bremsbacke (siehe Bild unten), die mit vier Federn gegen das Teleskoprohr gedrückt wird. Ein pneumatischer Membranaktor löst die Bremse gegen die Federkraft. Bei der Längsverschiebung des Teleskoprohrs sorgt eine abrollbare Energieführungskette vom Gehäuse zum Teleskoprohr für die flexible Führung der elektrischen und pneumatischen Leitungen. Da die rotatorische Bremswirkung der Backenbremse nicht ausreicht, wurde zusätzlich eine Rotationsbremse eingebaut, die als Lamellenbremse ausgeführt ist und mit einem Kolbenaktor betätigt wird, siehe Bild unten.
Bremsbacke rechts, Lamellen der Rotationsbremse links
Für die flexible Feinpositionierung des Endoskops befinden sich am vorderen Ende des Teleskops ein Schwenk- und ein Drehgelenk, siehe Bild unten. Die Schwenkbewegung um das Teleskoprohr lässt sich mit einer Lamellenbremse anhand eines Kolbenaktors fixieren, wohingegen das Drehgelenk zur Variation des Endoskopeingriffwinkels mit einer Doppelkegelbremse versehen ist, die mit einem Kolbenaktor betätigt wird.
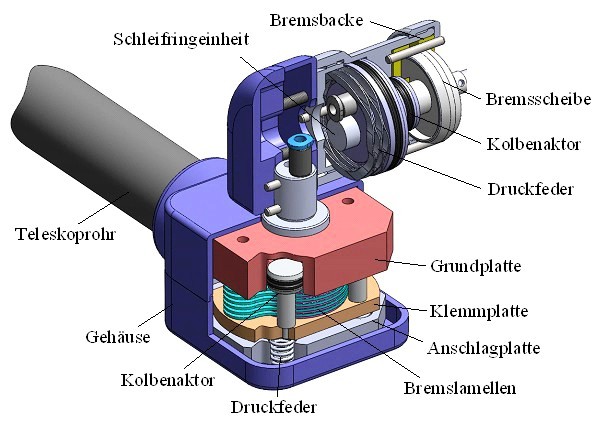

Schwenk- und Drehgelenk montiert (rechts)
Bei dem von uns entwickelten Haltesystem wird das Endoskop durch die pneumatisch arretierbare Halterung fixiert und muss während der Operation nicht bewegt werden. Dadurch sinkt die Gefahr, den Patienten mit dem Endoskop zu verletzen, deutlich. Die Nachführung des Bildausschnitts erfolgt wahlweise durch die Abwinklung der Endoskopspitze (siehe Kapitel 7) oder durch die Variation der Blickrichtung anhand eines Schwenkprismas (siehe unten).
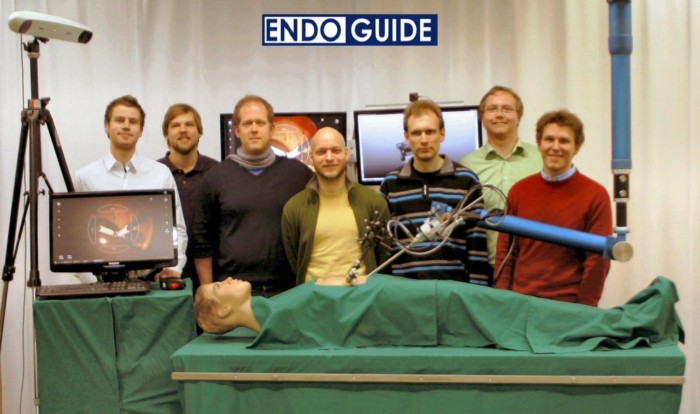
Präsentation auf der Medizintechnik-Messe MEDICA
Wir stellten während der Medizintechnik-Messe MEDICA in Düsseldorf im Winter 2010 dem dortigen Publikum die Ziele des Projekts Endoguide vor und erläuterten anhand von praktischen Vorführungen den Einsatz des Haltearms und eines Endoskops am Kunstpatienten die Vorteile dieser Neuerung für den OP-Bereich (siehe folgendes Bild).

Dabei wurde die Positioniervorrichtung für das Endoskop in Diskussionen mit dem Fachpublikum anerkennend gewürdigt. Operativ tätige Ärzte betonten die Notwendigkeit einer solchen Entwicklung.

vertreten das Fachgebiet FMT auf der MEDICA
Großes Interesse bestand auch an der aktorisch abwinkelbaren Spitze mit der Chip-on-the-Tip Kamera (Bild unten, näheres siehe Kapitel 7), sowohl seitens der Hersteller von Medizintechnikprodukten, als auch seitens der im OP-Bereich tätigen Ärzte.
sowie die Funktion seiner Entwicklung einer abwinkelbaren Endoskopspitze
Optisches Lageerfassungssystem
Im
Gegensatz zu offenen Operationen, bei denen der Arzt den gesamten
OP-Situs einsieht, ist die Lage der Instrumentenspitzen im Bauchraum
nicht immer bekannt, da die Endoskopoptik nur einen beschränkten
Blickwinkel erfassen kann. Ein weiteres Projektziel bestand daher
darin, Methoden der virtuellen Realität zu erproben, um
beispielsweise die Position und die Ausrichtung der Instrumente,
welche mit einem Lageerfassungssystem gewonnen werden, in die
3D-Darstellung des Abdomens einzublenden und diese Information auf
einem Bildschirm wiederzugeben.
Um
eine hohe Genauigkeit bei der Ortung der Instrumente zu erzielen,
setzten wir das optische Tracker-System PolarisSpectra der Firma NDI
ein. Es besteht aus zwei Kameras und einem Infrarot-LED-Array.
Bestückt man die Instrumente mit optischen Markern, lässt sich
deren genaue Position und Ausrichtung im Raum durch Reflektion
der ausgesandten Infrarotstrahlung über Triangulation durch die
Kameras innerhalb eines Arbeitsraums von mehr als einem Kubikmeter
auf 0,5 mm genau erfassen (optisches Tracken). Damit lassen sich
bis zu 15 verschiedene Instrumente im Arbeitsraum
verfolgen.

steuert den Blickwinkel des Endoskops anhand von Sprachbefehlen
Die
Abbildung oben zeigt eine typische OP-Situation, in der Dipl.-Ing.
Martin Kelp mittels der beiden Endoskopbilder auf den linken
Bildschirmen seine Aktionen visuell verfolgt, die er im Abdomen des
Kunstpatienten ausführt. Auf dem rechten Monitor ist eine
3D-Abbildung des Abdomens dargestellt, welche beispielsweise durch
Computertomographie gewonnen wurde. Mit Hilfe des optischen Trackings
erhält man die aktuellen Positionen und Posen der OP-Instrumente
inklusive des Endoskops und kann diese ebenfalls am Bildschirm
einblenden. Dies erlaubt dem Arzt, die Bewegungsvorgänge der
Instrumente und des Endoskops auf dem Monitor rechts als
Graufarben-Bild zu verfolgen.
An
den Instrumenten erkennt man im Handbereich die optischen Marker,
welche das Infrarotlicht des LED-Arrays reflektieren. Die zur
Triangulation genutzten zwei Kameras sind, ebenso wie das LED-Array,
in einer Einheit untergebracht, die auf einem Stativ links oben
befestigt ist (siehe auch Bild unten).

die Präzision beim optischen Tracking
Das nächste Bild erlaubt eine deutlichere Sicht auf den OP-Bereich und die optischen Marker an den Instrumenten. Der Schaft des an der Haltevorrichtung befestigten Endoskopiesystems befindet sich, geführt über einen Trokar, teilweise im Bauchraum des Kunstpatienten. Zwischen dem Endoskopschaft und der Endoskopkamera Image 1 HD der Firma Karl Storz sind eine Reihe von Erweiterungsmodulen eingefügt, welche eine variable Blickrichtung im Abdomen ermöglichen, siehe Abschnitt weiter unten.
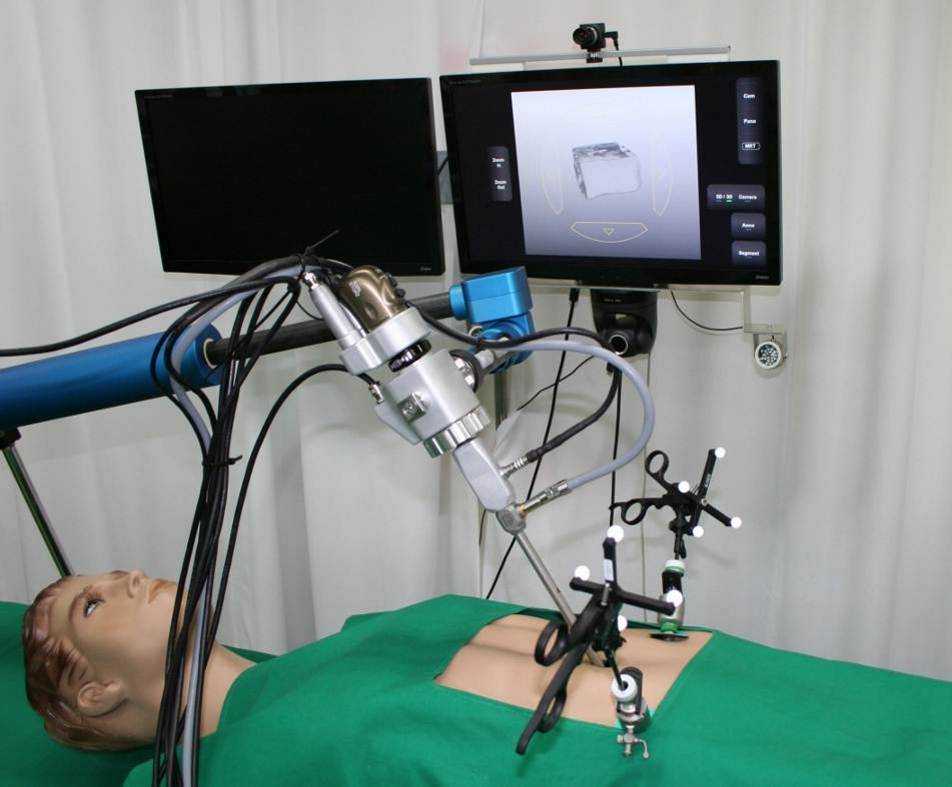
inklusive der Instrumente im Abdomen
Modulare Erweiterung des Endoskopiesystems
Die Arretierung des Endoskops am Haltearm sowie der Verzicht auf einen Kameraassistenten bedingen Funktionserweiterungen für das Endoskopiesystem, um die Steuerung der Blickrichtung durch die Rotation des Endoskopschafts und das Schwenken eines Prismas oder das Abknicken der Endoskopspitze zu bewerkstelligen. Zu diesem Funktionsbereich gehören auch die Zoom- und Fokusaktionen. Hierzu erarbeitete die Arbeitsgruppe des FMT Erweiterungsmodule, welche die vom Projektpartner Karl Storz vertriebene Endoskopkamera Image1 HD sowie das Schwenkprismenendoskop Endocameleon in der Weise ergänzten, dass sich die o. g. Funktionen durch den Arzt durch berührungslose Interaktionen, beispielsweise Augen- und Sprachsteuerung oder durch Gesten sowie Fußbedienung, ausführen lassen. Dabei wurden die Erweiterungsmodule so ausgelegt, dass sich die Endoskope variabel im OP einsetzen lassen, wahlweise als Standard-Endoskop bei herkömmlichen minimal-invasiven Eingriffen oder auch in Funktionseinheit mit dem Haltearm.
Parallel zur Entwicklung der Erweiterungsmodule für den Einsatz von Standard-OP-Systemen am Haltearm, entwickelte das FMT-Team völlig neue Konzepte zum Endoskopaufbau, gleichermaßen mit dem Ziel, die Blickrichtung des Endoskops sowie den Blickwinkel und die Fokussierung variabel einzustellen. Dies betrifft die Arbeiten zum Abknicken der Endoskopspitze sowie auch alle Entwicklungen von Chip-on-the-Tip-Kameras (vgl. Kapitel 7).
Bei den Erweiterungsmodulen handelt es sich um Bauteile, welche sich zwischen dem Endoskop und der Kamera befinden, womit sich der Endoskopschaft drehen und das Schwenkprisma durch Antriebe kippen lässt. Das Bild unten links zeigt einen Rotationsadapter im Schnitt. Dieses Bauteil wird zwischen Endoskop und Kamera eingefügt. Es besteht aus einen drehbaren Teil, der mit Hilfe einer Kupplung das Endoskop aufnimmt und einem feststehenden Teil, der am Ende eine Okularmuschel aufweist, an welche man die Endoskopkamera anschließt. Der drehbare Teil ist in dem feststehenden Teil rotierbar gelagert. Da sich der Rotationsadapter zwischen Endoskop und Kamera befindet, die im Normalfall in direktem optischen Kontakt stehen, ist es notwendig, ein optisches System zu integrieren, welches als optisches Relais agiert und eine 1:1 Abbildung erzeugt.
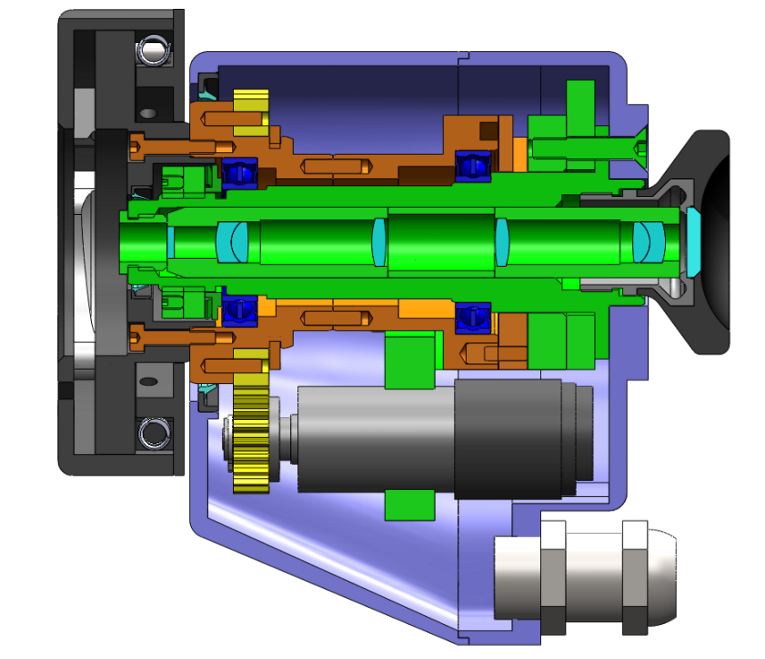

Im
Bild oben links sind folgende Komponenten zu erkennen: feststehender
Teil (grün), drehbarer Teil (braun), Lager (dunkelblau). Das
optische Linsensystem ist im feststehenden Teil integriert
(hellblau). Am drehbaren Teil ist die Kupplung (schwarz) befestigt,
die das Endoskop aufnimmt. Die Kupplung dreht sich mit dem drehbaren
Teil des Adapters und überträgt die Rotation auf das Endoskop. Die
Drehbewegung wird mit Hilfe eines im feststehenden Teil integrierten
Antriebsmotors (schwarz / grau) und eines Stirnradgetriebes (gelb)
übertragen.
Das
Bild oben rechts zeigt eine Ausführung des Rotationsadapters, welche
für das Haltesystem konzipiert wurde. Er bildet das Bindeglied
zwischen Endoskop und Kamera. Der Adapter lässt sich am Haltearm
mittels einer Schnellkupplung ohne Werkzeug montieren
(Vierkantaufnahme).
Der
Rotationadapter ermöglicht den schnellen Anschluss aller
gebräuchlichen Endoskope. Da dessen Befestigung über die
Okularmuschel erfolgt, sind Endoskope aller Schaftdurchmesser schnell
montierbar. Aufgrund der Fixierung der Kamera an der auf der
Rückseite befindlichen Okularmuschel, lassen sich auch alle gängigen
Kameras montieren.
Ein weiterer, kurzer Rotationsadapter erfordert kein optisches System. Die Zwischenoptik lässt sich einsparen, indem man die Kamera direkt auf der Okularmuschel des Endoskops befestigt. Diese Adapterversion lässt sich allerdings nur mit dem Endocameleon nutzen und ist aufgrund der eingeschränkten räumlichen Verhältnisse sehr flach aufgebaut, so dass die Okularmuschel des Endocameleons hinten herausschaut (vgl. Abbildung unten rechts), woran sich die Endoskopkamera montieren lässt. Die Drehwinkeleinstellung des Endoskopschafts erfolgt durch einen im Gehäuse eingebauten Servomotor.


Die folgende Abbildung zeigt den Aufbau des Endocameleons mit dem flachen Rotationsadapter und der Endoskopkamera, die hier allerdings durch optische Marker verdeckt ist. Diese Einheit lässt sich anhand der seitlich am Adapter angeordneten Schnellkupplungselemente an den Haltearm ankoppeln.
Durch die Entwicklung einer weiteren Adaptervariante lässt sich zusätzlich zur Endoskoprotation auch das Schwenkprisma für die Seitenblickoptik des Endocameleons (vgl. Kapitel 7) aktorisch bewegen, so dass der Arzt anhand der Drehung des Endoskopschafts und der Kippung des Schwenkprismas einen kompletten Überblick des Abdomens erlangt. Die folgende Skizze verdeutlicht den Aufbau dieses Antriebsmoduls zur Steuerung der Schwenkprismenverstellung und der Endoskoprotation.
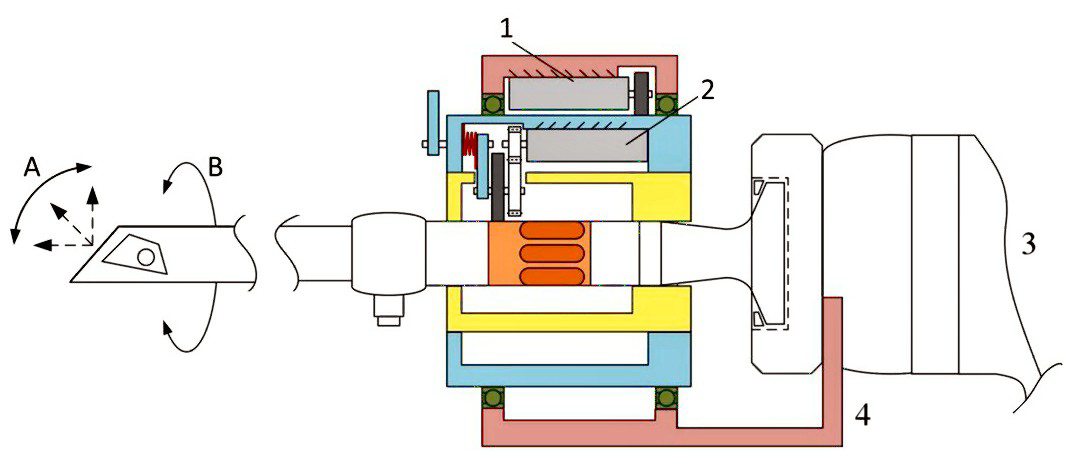
und zur Betätigung des Schwenkprismas
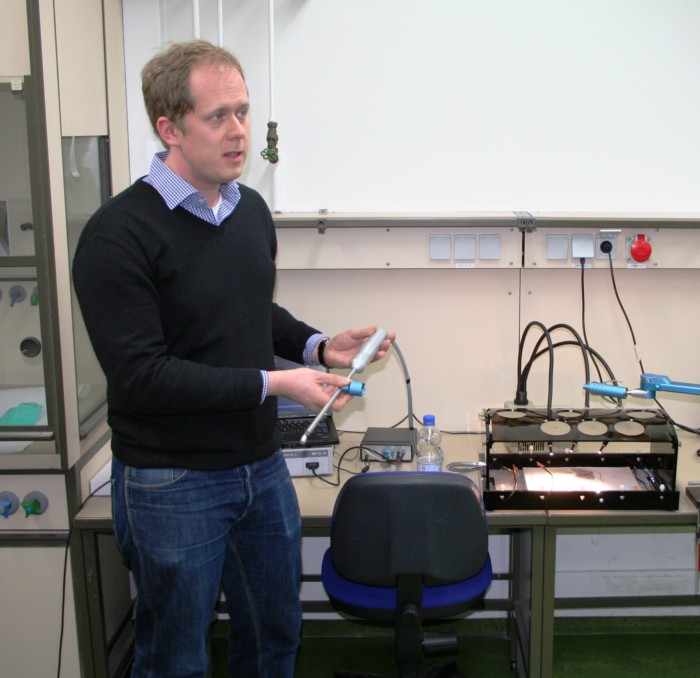
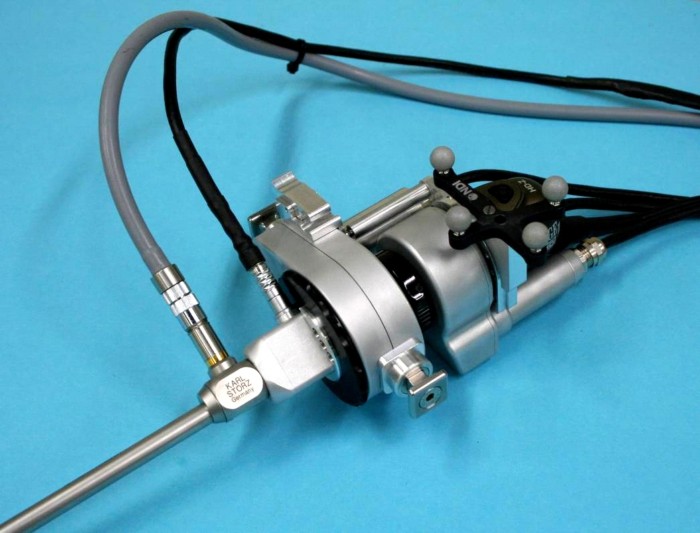
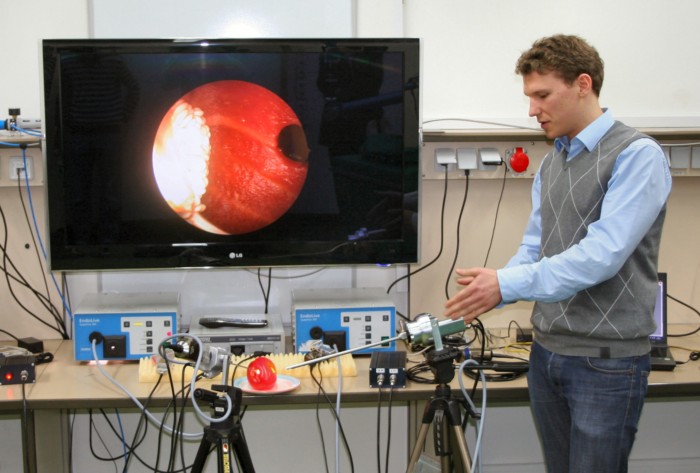
Im Rahmen des Projekts Endoguide kam hauptsächlich das von Dipl.-Ing. Martin Kelp modifizierte Schwenkprismenendoskop Endocameleon zum Einsatz, bei dem die Prismenverstellung nicht von Hand, sondern mit einem Aktor gesteuert ausgeführt wird (vgl. Kapitel 7). Das folgende Bild zeigt Herrn Kelp bei der Demonstration des Schwenkprismenantriebs aus Anlass eines Projekttreffens.
Das Schwenkprismenendoskop ist im Antriebsmodul befestigt. Der innere Teil des Antriebsmoduls ist drehbar gegenüber dem äußeren, feststehenden Teil gelagert und lässt sich mit einem Motor (1) drehen. Dabei rotiert auch das Schwenkprismenendoskop (B). Die Image 1 HD Kamera (3) ist auf der Okularmuschel des Endoskops montiert und über eine Drehmomentstütze (4) mit dem feststehenden Teil des Antriebsmoduls verbunden, damit beim Rotieren des Endoskops (B) der Bildhorizont bestehen bleibt. Für eine unbeschränkte Wahl der Blickrichtung ist neben der Endoskoprotation (B) die Abwinklung des Schwenkprismas (A) erforderlich. Diese erfolgt durch Verdrehen eines Stellrings. Ein zweiter Motor (2) treibt über ein Getriebe Reibräder an, die diesen Bedienring verdrehen und damit die Schwenkwinkelverstellung realisieren. Am Gehäuse des Antriebsmoduls befinden sich Kupplungen zur Befestigung des Rotationsadapters an dem deckengebundenen Haltesystem.
Die Aufnahme der Endoskopbilder erfolgt mit der Kamera Image 1 HD des Projektpartners KST. Deren Fokus- und Zoomeinstellung geschieht bisher manuell, durch Drehung eines Außenrings, der über eine Magnetkupplung die Verschiebung von Linsen im Innern der Kamera bewirkt. Wir entwickelten eine Antriebslösung, bei der ein Aufsteckadapter mit kleinen Motoren die manuell verstellbaren Drehräder der Kamera antreibt. Die folgende Abbildung zeigt links die ursprüngliche Kamera mit den manuell zu betätigenden Drehrädern. Daneben ist rechts die modifizierte Kamera mit dem Prototyp des Aufsteckadapters gezeigt. Die Ansteuerung der Motoren erfolgt über Taster, die sich in einer Fernbedienung befinden.


Das Endoskopsystem mit dem Antriebsmodul und dem Antriebsadapter für die modifizierte Image 1 HD Kamera ist in der folgenden Abbildung als CAD-Modell dargestellt. Ein seitlicher Aufsatz enthält die Antriebe für die Rotation des Endoskopschafts sowie für die Bewegung des Schwenkprismas.
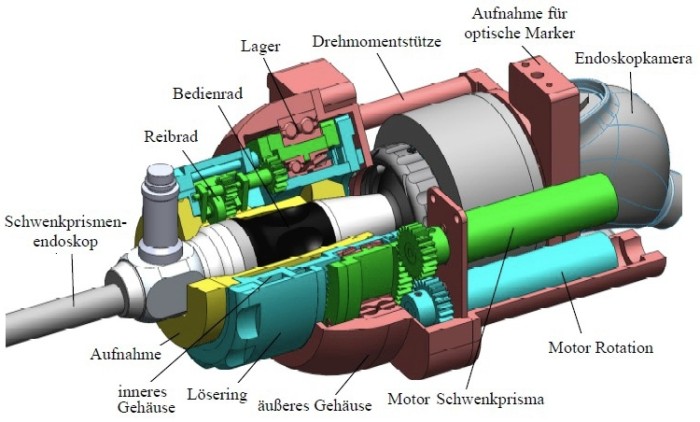
Antriebsmodul und Endoskopkamera
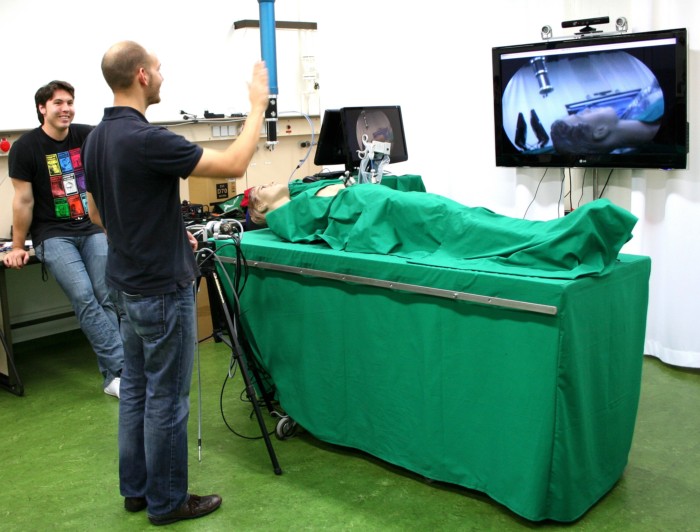
Die folgende Abbildung zeigt das komplett aufgebaute Endoskopsystem mit Antriebsmodul und Antriebsadapter im Einsatz. Es ist über die Schnellkupplung am Haltearm befestigt. Unterhalb des linken Monitors befinden sich Mikrofone zur Sprachsteuerung, hierzu siehe nächsten Abschnitt.
Erprobung der Sprach- und Gestensteuerung am Endoskopsystem
Im Projekt Endoguide wurden interdisziplinäre Lösungen erarbeitet, um dem Operateur die direkte Kontrolle über sein Blickfeld zu geben, ihn durch den Einsatz von Virtual Reality (VR)- / Augmented Reality (AR)-Techniken zu unterstützen und den Assistenten durch eine mechanische Halterung zu ersetzen. Hierzu richteten die Projektpartner Karl Storz, How-to-Organize und Fraunhofer FIRST Mensch-Maschine-Schnittstellen ein, um diese am erweiterten Endocameleon am Haltearm praktisch zu testen. Dies betraf die Variation des Blickfelds (Drehschaft, Schwenkprisma) sowie die Einstellung des Bildwinkels (Zoom) und der Bildschärfe (Fokusfunktion) anhand von Sprachsteuerung, Kopfsteuerung oder Blicksteuerung.
Diese Schnittstellen standen uns nach Projektende nicht mehr zur Verfügung, da die Projektpartner die Hardwarekomponenten der Mensch-Maschine-Schnittstellen für eigene Forschungszwecke nutzten, so dass wir für Testzwecke eine kommerziell verfügbare berührungslose Steuerung einsetzten, die auf dem Sensorsystem Kinect der Firma Microsoft aufbaute, welches im nächsten Bild oberhalb des Monitors zu erkennen ist.

sowie Kamerasystemen zur Gestensteuerung
Die Kinect ist ein Sensorarray, welches die Aufnahme von akustischen Signalen, RGB-Bildern und deren Tiefeninformation im Blickfeld der Sensoren ermöglicht. Über die Auswertung dieser Informationen lässt sich eine Sprach- und Gestensteuerung implementieren.
Für die Aufnahme von Sprachbefehlen stehen bei der Kinect vier Mikrofone zur Verfügung, wobei man anhand der Analyse von Laufzeitmessungen auch die Position der Geräuschquelle ermitteln kann. Meine wissenschaftlichen Mitarbeiter untersuchten eingehend die Einsatzmöglichkeiten der Sprachsteuerung im OP-Bereich und testeten unterstützt durch optisches Tracking verschiedene Szenarien zur Änderung der Blickrichtung, zur Vergrößerung des Bilds und zu dessen Scharfeinstellung (siehe Bild unten).

erproben die Sprachsteuerung zur Änderung der Blickrichtung des Endoskops
Zur Erstellung eines Tiefenbilds projiziert ein Infrarotprojektor ein nicht sichtbares Punktmuster in den Raum. Die Kameras detektieren die Reflexe an Gegenständen oder Personen, woraus durch Triangulation ein Tiefenbild des Raums erzeugt wird. Hiermit lassen sich die Umrisse von Menschen identifizieren sowie die Lage von Armen und Beinen räumlich erfassen, wodurch die Kinect Handgesten erkennt. Um die Sprach- und Gestensteuerung mit der Kinect zu bewerkstelligen, war es erforderlich, die Sprachmuster sowie die Kamerabilder softwaretechnisch auszuwerten, eine Aufgabe, die Dipl.-Ing. Sebastian Greiner löste. In der folgenden Abbildung testet er die Gestensteuerung für verschiedene Endoskopfunktionen.

Da der Gebrauch der Gestensteuerung einige Übung erfordert, wies Dipl.-Ing. Sebastian Greiner eine Reihe meiner Mitarbeiter in die Bedienung ein (siehe folgendes Bild).
nach Hinweisen von Dipl.-Ing. Sebastian Greiner
Zusammenfassend lassen sich nach dem Abschluss des Endoguide-Projekts sehr viele erfreuliche Ergebnisse festhalten: Es entstanden während dieser Zeit sieben herausragende Dissertationen, zehn anspruchsvolle Diplomarbeiten, 19 Studien- und Projektarbeiten, 12 Bachelor- und zwei Masterarbeiten, 12 Patente und zahlreiche internationale Veröffentlichungen. Wir erhielten zur Finanzierung unseres wissenschaftlichen Personals vom BMBF fast eine Million Euro Forschungsgelder. Die FMT-Medizintechnik-Gruppe entwickelte höchst innovative und produktnahe Komponenten für die Endoskopie und für moderne OP-Einrichtungen, die noch lange Zeit den Fortschritt der minimal-invasiven Technik beeinflussen werden.