Auswahl aus unseren Forschungsaktivitäten
Die enge Zusammenarbeit mit unseren Industriepartnern zur Entwicklung innovativer Produkte erzwingt bilaterale Geheimhaltungsvereinbarungen, so dass die unten aufgeführten Beispiele nur einen kleinen Einblick in unsere Entwicklungstätigkeiten bieten.
 |
Dr.-Ing. Sebastian Schlegel |
| Elektromechanische Antriebseinheit für das AKIM-Telechirurgiesystem |
 |
Dr.-Ing. Romon Chakrabarti |
| Logbuch
der Fahrten während des Forschungsprojekts Druckneutrale Systeme für
die Tiefsee Genese des AUVs PreToS |
 |
Dr.-Ing. Bastian Blase |
| Minimal-invasive motorisierte Instrumente |
 |
Dr.-Ing. Bastian Blase |
| Beleuchtungsmodul für Endoskope mittels Laserlicht |
 |
Dr.-Ing., Dipl.-Phys. Johannes Gelze |
| Navigation von autonomen Tiefseefahrzeugen |
 |
Dr.-Ing. Tino Schmidt |
| Ein aktives Trimmsystem für das AUV PreToS |

|
Dr.-Ing. Romon Chakrabarti |
| Die Entwicklung von autonomen Unterwasserfahrzeugen |
 |
Dr.-Ing. Daniel Brüggemann |
| Neuartiges Video-Endoskop mit distaler LED-Beleuchtung |
 |
Dr.-Ing.
Robert Dreyer genannt Daweke Dr.-Ing. Martin Kelp |
| Kabelloses medizinisches Chip-on-the-Tip-Stereoendoskop |
 |
Dr.-Ing. Martin Kelp |
| Positioniereinheit für eine Stereoendoskopkamera |
 |
Dr.-Ing. Martin Kelp |
| Neuartiger positionsgeregelter Linearantrieb |
 |
Dr.-Ing. Oliver Preradović |
| Pinguin-AUV PreToS |
 |
Dr.-Ing. Eugen Olenew |
| Manövriereinrichtungen für das AUV PreToS |
 |
Dr.-Ing. David Mischnick |
| Die Aussetz- und Bergevorrichtung für das autonome Unterwasserfahrzeug PreToS |
 |
Team PreToS |
| AUV PreToS mit Pressemitteilungen |
 |
Team PreToS |
| PreToS auf der Jungfernfahrt |
 |
Dr.-Ing. Martin Kelp |
| Miniaturisierte Linearaktoren |
 |
Team Medizintechnik |
| MEDICA 2010 - Messestand des Fachgebiets Mikrotechnik |
 |
Team Medizintechnik |
| 360°-Endoskopie-System |
 |
Dr.-Ing. Stefan Oginski |
| Führungssystem für minimal-invasive Verfahren |
 |
Dr.-Ing. Florian Bühs |
| Endoskop mit abwinkelbarer Spitze |
 |
Team Medizintechnik |
| Hochflexibles Tragarmsystem für Endoskope |
 |
Team Pegel |
| Die Pegel auf Konferenzen |
 |
Team Pegel |
| Die Pegel auf Tagungen |
 |
Dr.-Ing. Martin Lück |
| Druckneutrale Technik revolutioniert Tiefseefahrzeuge |
 |
Team Tiefsee |
| Seeerprobung |
 |
Dr.-Ing. Martin Lück |
| Entwicklung druckneutraler Unterwasserfahrzeuge |
 |
Team Pegel |
| Druckneutrales Unterwasserfahrzeug DNS Pegel |
 |
Dr.-Ing.
Daniel Brüggemann Dr.-Ing. Moritz Buscher Dr.-Ing. Tino Schmidt |
| Druckneutrale Komponenten für die Tiefsee |
 |
Dr.-Ing. Moritz Buscher |
| Druckneutrale Trimmvorrichtung für ein Unterwasserfahrzeug |
 |
FMT und MT.DERM |
| Stechimpfen für Medizin und Kosmetik |
 |
FMT und MT.DERM |
| Impfgerät für das intradermale DNS-Impfen |
 |
Dr.-Ing. Stephan Schrader |
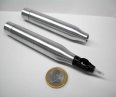
| Miniaturisierter Linearantrieb für optische Systeme |
 |
Dr.-Ing. Stephan Schrader |
| Mikromotor Ein Zwerg kommt groß raus |
 |
Dr.-Ing. Carl Thiede |
| Bildschärferegelung bei Miniaturkamerasystemen |
 |
Dr.-Ing. Carl Thiede |
| Miniaturisierte mobile Robotersysteme |
 |
Dr.-Ing. Martin Lück |
| Entwicklung eines miniaturisierten Pigmentiersystems |
 |
Dr.-Ing.
Stefan Beyer Dr.-Ing. Martin Lück |
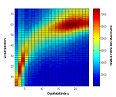
| Rotationssymmetrischer Triangulationssensor |
 |
Dr.-Ing. Steffen Walter |
| Miniaturisierte Klauenpolmotoren mit hoher Leistungsdichte |
 |
Dr.-Ing. Steffen Walter |
| Miniaturgenerator für die Energieversorgung autarker Schließsysteme |
 |
Dr.-Ing. Stephan Schrader |
| Entwicklung eines neuartigen dampfsterilisierbaren Videoendoskops für die Laparoskopie |
 |
Dr.-Ing. Ralf Ledworuski |
| Neues Ultraschallkathetersystem mit Mikroantrieb |